




1. Introduction
One of the driving questions in contact geometry is how much it differs from smooth topology. How far does it go beyond topology? Does it, for instance, remember not only the shape but also the size of an object? In the absence of a natural measure, the size in contact geometry can conveniently be addressed via contact (non-)squeezing. We say that a subset  $\Omega _a$ of a contact manifold
$\Omega _a$ of a contact manifold  $\Sigma$ can be contactly squeezed into a subset
$\Sigma$ can be contactly squeezed into a subset  $\Omega _b\subset \Sigma$ if, and only if, there exists a contact isotopy
$\Omega _b\subset \Sigma$ if, and only if, there exists a contact isotopy  $\varphi _t:\Sigma \to \Sigma,\ t\in [0,1]$ such that
$\varphi _t:\Sigma \to \Sigma,\ t\in [0,1]$ such that  $\varphi _0=\operatorname {id}$ and such that
$\varphi _0=\operatorname {id}$ and such that  $\overline {\varphi _1(\Omega _a)}\subset \Omega _b$. The most basic examples of contact manifolds are pessimistic as far as contact geometry and size are concerned. Namely, every bounded subset of the standard
$\overline {\varphi _1(\Omega _a)}\subset \Omega _b$. The most basic examples of contact manifolds are pessimistic as far as contact geometry and size are concerned. Namely, every bounded subset of the standard  $\operatorname {\mathbb {R}}^{2n+1}$ (considered with the contact form
$\operatorname {\mathbb {R}}^{2n+1}$ (considered with the contact form  $dz +\sum _{j=1}^n ( x_jdy_j - y_j dx_j)$) can be contactly squeezed into an arbitrarily small ball. This is because the map
$dz +\sum _{j=1}^n ( x_jdy_j - y_j dx_j)$) can be contactly squeezed into an arbitrarily small ball. This is because the map
 \begin{align*} \operatorname{\mathbb{R}}^{2n+1}\to\operatorname{\mathbb{R}}^{2n+1}\quad:\quad (x,y,z)\mapsto (k\cdot x, k\cdot y, k^2\cdot z) \end{align*}
\begin{align*} \operatorname{\mathbb{R}}^{2n+1}\to\operatorname{\mathbb{R}}^{2n+1}\quad:\quad (x,y,z)\mapsto (k\cdot x, k\cdot y, k^2\cdot z) \end{align*}
is a contactomorphism for all  $k\in \operatorname {\mathbb {R}}^+$. Consequently, every subset of a contact manifold whose closure is contained in a contact Darboux chart can be contactly squeezed into any non-empty open subset. In other words, contact geometry does not remember the size on a small scale. Somewhat surprisingly, this is not true on a large scale in general. In the next theorem,
$k\in \operatorname {\mathbb {R}}^+$. Consequently, every subset of a contact manifold whose closure is contained in a contact Darboux chart can be contactly squeezed into any non-empty open subset. In other words, contact geometry does not remember the size on a small scale. Somewhat surprisingly, this is not true on a large scale in general. In the next theorem,  $B(R)$ denotes the ball of radius
$B(R)$ denotes the ball of radius  $R$.
$R$.
Theorem 1.1 (Eliashberg–Kim–Polterovich and Chiu)
The subset  $\widehat {B}(R) := B(R)\times \mathbb {S}^1$ of
$\widehat {B}(R) := B(R)\times \mathbb {S}^1$ of  $\mathbb {C}^n\times \mathbb {S}^1$ can be contactly squeezed into itself via a compactly supported contact isotopy if, and only if,
$\mathbb {C}^n\times \mathbb {S}^1$ can be contactly squeezed into itself via a compactly supported contact isotopy if, and only if,  $R<1$.
$R<1$.
This remarkable phenomenon, that may be seen as a manifestation of the Heisenberg uncertainty principle, was first observed by Eliashberg, Kim, and Polterovich [Reference Eliashberg, Kim and PolterovichEKP06]. They proved the case where either  $R<1$ or
$R<1$ or  $R\in \mathbb {N}$. Chiu [Reference ChiuChi17] extended their result to radii that are not necessarily integer. Fraser [Reference FraserFra16] presented an alternative proof of the case of non-integer radii that is more in line with the techniques used in [Reference Eliashberg, Kim and PolterovichEKP06]. (Fraser actually proved the following formally stronger statement: there does not exist a compactly supported contactomorphism of
$R\in \mathbb {N}$. Chiu [Reference ChiuChi17] extended their result to radii that are not necessarily integer. Fraser [Reference FraserFra16] presented an alternative proof of the case of non-integer radii that is more in line with the techniques used in [Reference Eliashberg, Kim and PolterovichEKP06]. (Fraser actually proved the following formally stronger statement: there does not exist a compactly supported contactomorphism of  $\mathbb {C}^n\times \mathbb {S}^1$ that maps the closure of
$\mathbb {C}^n\times \mathbb {S}^1$ that maps the closure of  $\widehat {B}(R)$ into
$\widehat {B}(R)$ into  $\widehat {B}(R)$ if
$\widehat {B}(R)$ if  $R\geqslant 1$. It seems not to be known whether the group of compactly supported contactomorphisms of
$R\geqslant 1$. It seems not to be known whether the group of compactly supported contactomorphisms of  $\mathbb {C}^n\times \mathbb {S}^1$ is connected.) Using generating functions, Sandon reproved the case of integer radii [Reference SandonSan11].
$\mathbb {C}^n\times \mathbb {S}^1$ is connected.) Using generating functions, Sandon reproved the case of integer radii [Reference SandonSan11].
The contact non-squeezing results are rare. Apart from Theorem 1.1, there are only few results about contact non-squeezing [Reference Eliashberg, Kim and PolterovichEKP06, Reference Albers and MerryAM18, Reference AllaisAll21, Reference De GrooteDeG19], and they are all concerning the subsets of the form  $U\times \mathbb {S}^1$ in the prequantization of a Liouville manifold. The present paper provides examples of contact manifolds that are diffeomorphic to standard spheres and that exhibit non-trivial contact non-squeezing phenomena. The following theorem is the first example of contact non-squeezing for a contractible subset, namely an embedded standard smooth ball.
$U\times \mathbb {S}^1$ in the prequantization of a Liouville manifold. The present paper provides examples of contact manifolds that are diffeomorphic to standard spheres and that exhibit non-trivial contact non-squeezing phenomena. The following theorem is the first example of contact non-squeezing for a contractible subset, namely an embedded standard smooth ball.
Theorem 1.2 Let  $\Sigma$ be an Ustilovsky sphere. Then, there exist two embedded closed balls
$\Sigma$ be an Ustilovsky sphere. Then, there exist two embedded closed balls  $B_1, B_2\subset \Sigma$ of dimension equal to
$B_1, B_2\subset \Sigma$ of dimension equal to  $\dim \Sigma$ such that
$\dim \Sigma$ such that  $B_1$ cannot be contactly squeezed into
$B_1$ cannot be contactly squeezed into  $B_2$.
$B_2$.
An Ustilovky sphere is the  $(4m+1)$-dimensional Brieskorn manifold
$(4m+1)$-dimensional Brieskorn manifold
 \[ \{ z=(z_0,\ldots, z_{2m+1})\in\mathbb{C}^{2m+2}\,|\, z_0^p + z_1^2 +\cdots + z_{2m+1}^2=0 \text{ and } \lvert z \rvert=1\} \]
\[ \{ z=(z_0,\ldots, z_{2m+1})\in\mathbb{C}^{2m+2}\,|\, z_0^p + z_1^2 +\cdots + z_{2m+1}^2=0 \text{ and } \lvert z \rvert=1\} \]
associated with natural numbers  $m, p\in \mathbb {N}$ with
$m, p\in \mathbb {N}$ with  $p\equiv \pm 1 \pmod {8}$. The Ustilovsky sphere is endowed with the contact structure given by the contact from
$p\equiv \pm 1 \pmod {8}$. The Ustilovsky sphere is endowed with the contact structure given by the contact from
 \[ \alpha_p:= \frac{i p}{8}\cdot (z_0d\overline{z}_0-\overline{z}_0dz_0) + \frac{i}{4}\cdot \sum_{j=1}^{2m+1}(z_jd\overline{z}_j-\overline{z}_jdz_j). \]
\[ \alpha_p:= \frac{i p}{8}\cdot (z_0d\overline{z}_0-\overline{z}_0dz_0) + \frac{i}{4}\cdot \sum_{j=1}^{2m+1}(z_jd\overline{z}_j-\overline{z}_jdz_j). \]
These Brieskorn manifolds were used by Ustilovsky [Reference UstilovskyUst99] to prove the existence of infinitely many exotic contact structures on the standard sphere that have the same homotopy type as the standard contact structure. The strength of Theorem 1.2 lies in the topological simplicity of the objects used. A closed ball embedded in a smooth manifold can always be smoothly squeezed into an arbitrarily small (non-empty) open subset. Moreover, the obstruction to contact squeezing in Theorem 1.2 does not lie in the homotopy properties of the contact distribution. Namely, the contact distribution of an Ustilovsky sphere for  $p\equiv 1 \pmod {2(2m)!}$ is homotopic to the standard contact distribution on the sphere and the contact non-squeezing on the standard contact sphere is trivial. A consequence of Theorem 1.2 is a contact non-squeezing on
$p\equiv 1 \pmod {2(2m)!}$ is homotopic to the standard contact distribution on the sphere and the contact non-squeezing on the standard contact sphere is trivial. A consequence of Theorem 1.2 is a contact non-squeezing on  $\operatorname {\mathbb {R}}^{4m+1}$ endowed with a non-standard contact structure.
$\operatorname {\mathbb {R}}^{4m+1}$ endowed with a non-standard contact structure.
Corollary 1.3 Let  $m\in \mathbb {N}$. Then, there exist a contact structure
$m\in \mathbb {N}$. Then, there exist a contact structure  $\xi$ on
$\xi$ on  $\operatorname {\mathbb {R}}^{4m+1}$ and an embedded
$\operatorname {\mathbb {R}}^{4m+1}$ and an embedded  $(4m+1)$-dimensional closed ball
$(4m+1)$-dimensional closed ball  $B\subset \operatorname {\mathbb {R}}^{4m+1}$ such that
$B\subset \operatorname {\mathbb {R}}^{4m+1}$ such that  $B$ cannot be squeezed into an arbitrary open non-empty subset by a compactly supported contact isotopy of
$B$ cannot be squeezed into an arbitrary open non-empty subset by a compactly supported contact isotopy of  $(\operatorname {\mathbb {R}}^{4m+1}, \xi )$.
$(\operatorname {\mathbb {R}}^{4m+1}, \xi )$.
The exotic  $\operatorname {\mathbb {R}}^{4m+1}$ in Corollary 1.3 is obtained by removing a point from an Ustilovsky sphere. In fact, the contact non-squeezing implies that
$\operatorname {\mathbb {R}}^{4m+1}$ in Corollary 1.3 is obtained by removing a point from an Ustilovsky sphere. In fact, the contact non-squeezing implies that  $(\operatorname {\mathbb {R}}^{4m+1}, \xi )$ constructed in this way (although tight) is not contactomorphic to the standard
$(\operatorname {\mathbb {R}}^{4m+1}, \xi )$ constructed in this way (although tight) is not contactomorphic to the standard  $\operatorname {\mathbb {R}}^{4m+1}$. A more general result was proven by Fauteux-Chapleau and Helfer [Reference Fauteux-Chapleau and HelferFH21] using a variant of contact homology: there exist infinitely many pairwise non-contactomorphic tight contact structures on
$\operatorname {\mathbb {R}}^{4m+1}$. A more general result was proven by Fauteux-Chapleau and Helfer [Reference Fauteux-Chapleau and HelferFH21] using a variant of contact homology: there exist infinitely many pairwise non-contactomorphic tight contact structures on  $\operatorname {\mathbb {R}}^{2n+1}$ if
$\operatorname {\mathbb {R}}^{2n+1}$ if  $n>1$.
$n>1$.
Theorem 1.2 is a consequence of the following theorem about homotopy spheres that bound Liouville domains with large symplectic homology.
Theorem 1.4 Let  $n> 2$ be a natural number and let
$n> 2$ be a natural number and let  $W$ be a
$W$ be a  $2n$-dimensional Liouville domain such that
$2n$-dimensional Liouville domain such that  $\dim SH_\ast (W) > \sum _{j=1}^{2n} \dim H_j(W;\mathbb {Z}_2)$ and such that
$\dim SH_\ast (W) > \sum _{j=1}^{2n} \dim H_j(W;\mathbb {Z}_2)$ and such that  $\partial W$ is a homotopy sphere. Then, there exist two embedded closed balls
$\partial W$ is a homotopy sphere. Then, there exist two embedded closed balls  $B_1, B_2\subset \partial W$ of dimension
$B_1, B_2\subset \partial W$ of dimension  $2n-1$ such that
$2n-1$ such that  $B_1$ cannot be contactly squeezed into
$B_1$ cannot be contactly squeezed into  $B_2$.
$B_2$.
The smooth non-squeezing problem for a homotopy sphere is trivial: every non-dense subset of a homotopy sphere can be smoothly squeezed into an arbitrary non-empty open subset. This is due to the existence of Morse functions with precisely two critical points on the homotopy spheres. A smooth squeezing can be realized by the gradient flow of such a Morse function. Plenty of examples of Liouville domains that satisfy the conditions of Theorem 1.4 can be found among Brieskorn varieties. The Brieskorn variety  $V(a_0,\ldots, a_m)$ is a Stein domain whose boundary is contactomorphic to the Brieskorn manifold
$V(a_0,\ldots, a_m)$ is a Stein domain whose boundary is contactomorphic to the Brieskorn manifold  $\Sigma (a_0,\ldots, a_m)$. Brieskorn [Reference BrieskornBri66, Satz 1] proved a simple sufficient and necessary condition (conjectured by Milnor) for a Brieskorn manifold to be homeomorphic to a sphere (see also [Reference Kwon and van KoertKvK16, Proposition 3.6]). Many of the corresponding Brieskorn varieties have infinite-dimensional symplectic homology, for instance
$\Sigma (a_0,\ldots, a_m)$. Brieskorn [Reference BrieskornBri66, Satz 1] proved a simple sufficient and necessary condition (conjectured by Milnor) for a Brieskorn manifold to be homeomorphic to a sphere (see also [Reference Kwon and van KoertKvK16, Proposition 3.6]). Many of the corresponding Brieskorn varieties have infinite-dimensional symplectic homology, for instance  $V(3,2,2,\ldots,2)$. Thus, Theorem 1.4 also implies that there exists a non-trivial contact non-squeezing on the Kervaire spheres, i.e. on
$V(3,2,2,\ldots,2)$. Thus, Theorem 1.4 also implies that there exists a non-trivial contact non-squeezing on the Kervaire spheres, i.e. on  $\Sigma (3,2,\ldots, 2)$ for an odd number of twos.
$\Sigma (3,2,\ldots, 2)$ for an odd number of twos.
Our non-squeezing results are obtained using a novel version of symplectic homology, called selective symplectic homology, that is introduced in the present paper. It resembles the relative symplectic cohomology by Varolgunes [Reference VarolgunesVar21], although the relative symplectic (co)homology and the selective symplectic homology are not quite the same. The selective symplectic homology,  $SH_\ast ^\Omega (W)$, is associated to a Liouville domain
$SH_\ast ^\Omega (W)$, is associated to a Liouville domain  $W$ and an open subset
$W$ and an open subset  $\Omega \subset \partial W$ of its boundary. Informally,
$\Omega \subset \partial W$ of its boundary. Informally,  $SH_\ast ^{\Omega }(W)$ is defined as the Floer homology for a Hamiltonian on
$SH_\ast ^{\Omega }(W)$ is defined as the Floer homology for a Hamiltonian on  $W$ that is equal to
$W$ that is equal to  $+\infty$ on
$+\infty$ on  $\Omega$ and to 0 on
$\Omega$ and to 0 on  $\partial W\setminus \Omega$ (whereas, in this simplified view, the symplectic homology corresponds to a Hamiltonian that is equal to
$\partial W\setminus \Omega$ (whereas, in this simplified view, the symplectic homology corresponds to a Hamiltonian that is equal to  $+\infty$ everywhere on
$+\infty$ everywhere on  $\partial W$). The precise definition of the selective symplectic homology is given in § 3 below.
$\partial W$). The precise definition of the selective symplectic homology is given in § 3 below.
The selective symplectic homology is related to the symplectic (co)homology of a Liouville sector that was introduced in [Reference Ganatra, Pardon and ShendeGPS20] by Ganatra, Pardon, and Shende. As described in detail in [Reference Ganatra, Pardon and ShendeGPS20], every Liouville sector can be obtained from a Liouville manifold  $X$ by removing the image of a stop. The notion of a stop on a Liouville manifold
$X$ by removing the image of a stop. The notion of a stop on a Liouville manifold  $X$ was defined by Sylvan [Reference SylvanSyl19] as a proper, codimension-0 embedding
$X$ was defined by Sylvan [Reference SylvanSyl19] as a proper, codimension-0 embedding  $\sigma : F\times \mathbb {C}_{\operatorname {Re}<0}\to X$, where
$\sigma : F\times \mathbb {C}_{\operatorname {Re}<0}\to X$, where  $F$ is a Liouville manifold, such that
$F$ is a Liouville manifold, such that  $\sigma ^\ast \lambda _X= \lambda _F + \lambda _{\mathbb {C}} + df$, for a compactly supported
$\sigma ^\ast \lambda _X= \lambda _F + \lambda _{\mathbb {C}} + df$, for a compactly supported  $f$. Here,
$f$. Here,  $\lambda _X, \lambda _F, \lambda _{\mathbb {C}}$ are the Liouville forms on
$\lambda _X, \lambda _F, \lambda _{\mathbb {C}}$ are the Liouville forms on  $X$,
$X$,  $F$, and
$F$, and  $\mathbb {C}_{\operatorname {Re}<0}$, respectively. We now compare the selective symplectic homology
$\mathbb {C}_{\operatorname {Re}<0}$, respectively. We now compare the selective symplectic homology  $SH_\ast ^\Omega (W)$ and the symplectic homology
$SH_\ast ^\Omega (W)$ and the symplectic homology  $SH_\ast (X, \partial X)$, where
$SH_\ast (X, \partial X)$, where  $X= \widehat {W}\setminus \operatorname {im}\sigma$ is the Liouville sector obtained by removing a stop
$X= \widehat {W}\setminus \operatorname {im}\sigma$ is the Liouville sector obtained by removing a stop  $\sigma$ from the completion
$\sigma$ from the completion  $\widehat {W}$, and
$\widehat {W}$, and  $\Omega$ is the interior of the set
$\Omega$ is the interior of the set  $\partial W \setminus \operatorname {im} \sigma$. Both
$\partial W \setminus \operatorname {im} \sigma$. Both  $SH_\ast ^\Omega (W)$ and
$SH_\ast ^\Omega (W)$ and  $SH_\ast (X, \partial X)$ are, informally speaking, Floer homologies for a Hamiltonian whose slope tends to infinity over
$SH_\ast (X, \partial X)$ are, informally speaking, Floer homologies for a Hamiltonian whose slope tends to infinity over  $\Omega$. However, as opposed to
$\Omega$. However, as opposed to  $SH_\ast (X,\partial X)$, the selective symplectic homology
$SH_\ast (X,\partial X)$, the selective symplectic homology  $SH_\ast ^\Omega (W)$ takes into account
$SH_\ast ^\Omega (W)$ takes into account  $\operatorname {im} \sigma \cap W$, i.e. the part of the stop that lies outside of the conical end
$\operatorname {im} \sigma \cap W$, i.e. the part of the stop that lies outside of the conical end  $\partial W\times (1,+\infty )$. In addition, in the selective symplectic homology theory, there are no restrictions on
$\partial W\times (1,+\infty )$. In addition, in the selective symplectic homology theory, there are no restrictions on  $\Omega$: it can be any open subset, not necessarily the one obtained by removing a stop. On the technical side,
$\Omega$: it can be any open subset, not necessarily the one obtained by removing a stop. On the technical side,  $SH_\ast (X,\partial X)$ and
$SH_\ast (X,\partial X)$ and  $SH_\ast ^\Omega (W)$ differ in the way the compactness issue is resolved. The symplectic homology of a Liouville sector is based on compactness arguments by Groman [Reference GromanGro15], whereas the selective symplectic homology relies on a version of the Alexandrov maximum principle [Reference Gilbarg and TrudingerGT77, Theorem 9.1], [Reference Abbondandolo and SchwarzAS09, Appendix A], [Reference Merry and UljarevićMU19]. It is an interesting question under what conditions
$SH_\ast ^\Omega (W)$ differ in the way the compactness issue is resolved. The symplectic homology of a Liouville sector is based on compactness arguments by Groman [Reference GromanGro15], whereas the selective symplectic homology relies on a version of the Alexandrov maximum principle [Reference Gilbarg and TrudingerGT77, Theorem 9.1], [Reference Abbondandolo and SchwarzAS09, Appendix A], [Reference Merry and UljarevićMU19]. It is an interesting question under what conditions  $SH_\ast ^\Omega (W)$ and
$SH_\ast ^\Omega (W)$ and  $SH_\ast (X, \partial X)$ actually coincide.
$SH_\ast (X, \partial X)$ actually coincide.
In simple terms, the non-squeezing results of the present paper are obtained by proving that a set  $\Omega _b\subset \partial W$ with big selective symplectic homology cannot be contactly squeezed into a subset
$\Omega _b\subset \partial W$ with big selective symplectic homology cannot be contactly squeezed into a subset  $\Omega _a\subset \partial W$ with
$\Omega _a\subset \partial W$ with  $SH_\ast ^{\Omega _a}(W)$ small (see Theorem 1.8). The computation of the selective symplectic homology is somewhat challenging even in the simplest non-trivial cases. The key computations in the paper are that of
$SH_\ast ^{\Omega _a}(W)$ small (see Theorem 1.8). The computation of the selective symplectic homology is somewhat challenging even in the simplest non-trivial cases. The key computations in the paper are that of  $SH_\ast ^D(W)$ where
$SH_\ast ^D(W)$ where  $D\subset \partial W$ is a contact Darboux chart, and that of
$D\subset \partial W$ is a contact Darboux chart, and that of  $SH^{\partial W\setminus D}_\ast (W)$. We prove that
$SH^{\partial W\setminus D}_\ast (W)$. We prove that  $SH_\ast ^D( W)$ is isomorphic to
$SH_\ast ^D( W)$ is isomorphic to  $SH_\ast ^\varnothing (W)$ by analysing the dynamics of a specific suitably chosen family of contact Hamiltonians that are supported in
$SH_\ast ^\varnothing (W)$ by analysing the dynamics of a specific suitably chosen family of contact Hamiltonians that are supported in  $D$ (see Theorem 6.1). On the other hand, by utilizing the existence of a contractible loop of contactomorphisms that is positive over
$D$ (see Theorem 6.1). On the other hand, by utilizing the existence of a contractible loop of contactomorphisms that is positive over  $D$, one can prove that
$D$, one can prove that  $SH^{\partial W\setminus D}_\ast (W)$ is big if
$SH^{\partial W\setminus D}_\ast (W)$ is big if  $SH_\ast (W)$ is big itself (see § 7). The proof is indirect and not quite straightforward. This proof also requires a feature of Floer homology for contact Hamiltonians that could be of interest in its own right and that has not appeared in the literature so far. Namely, there exists a collection of isomorphisms
$SH_\ast (W)$ is big itself (see § 7). The proof is indirect and not quite straightforward. This proof also requires a feature of Floer homology for contact Hamiltonians that could be of interest in its own right and that has not appeared in the literature so far. Namely, there exists a collection of isomorphisms  $\mathcal {B}(\sigma ): HF_\ast (h)\to HF_\ast (h\# f)$ (one isomorphism for each admissible
$\mathcal {B}(\sigma ): HF_\ast (h)\to HF_\ast (h\# f)$ (one isomorphism for each admissible  $h$) furnished by a family
$h$) furnished by a family  $\sigma$ of contactomorphisms of
$\sigma$ of contactomorphisms of  $\partial W$ that is indexed by a disc. In the formula above,
$\partial W$ that is indexed by a disc. In the formula above,  $f$ is the contact Hamiltonian that generates the ‘boundary loop’ of
$f$ is the contact Hamiltonian that generates the ‘boundary loop’ of  $\sigma$, and
$\sigma$, and  $h\#f$ is the contact Hamiltonian of the contact isotopy
$h\#f$ is the contact Hamiltonian of the contact isotopy  $\varphi ^h_t\circ \varphi ^f_t$. In addition, the isomorphisms
$\varphi ^h_t\circ \varphi ^f_t$. In addition, the isomorphisms  $\mathcal {B}(\sigma )$ give rise to an automorphism of the symplectic homology
$\mathcal {B}(\sigma )$ give rise to an automorphism of the symplectic homology  $SH_\ast (W)$.
$SH_\ast (W)$.
Remark 1.5 For the sake of simplicity, this paper defines the selective symplectic homology  $SH_\ast ^\Omega (W)$ in the framework of Liouville domains. The theory can actually be developed whenever
$SH_\ast ^\Omega (W)$ in the framework of Liouville domains. The theory can actually be developed whenever  $W$ is a symplectic manifold with contact type boundary such that the symplectic homology
$W$ is a symplectic manifold with contact type boundary such that the symplectic homology  $SH_\ast (W)$ is well defined. This is the case, for instance, if
$SH_\ast (W)$ is well defined. This is the case, for instance, if  $W$ is weakly+ monotone [Reference Hofer and SalamonHS95] symplectic manifold with convex end. Theorems 1.4 and 1.8 are valid in this more general setting.
$W$ is weakly+ monotone [Reference Hofer and SalamonHS95] symplectic manifold with convex end. Theorems 1.4 and 1.8 are valid in this more general setting.
What follows is a brief description of the main properties of the selective symplectic homology.
1.1 Empty set
The selective symplectic homology of the empty set is isomorphic, up to a shift in grading, to the singular homology of the Liouville domain relative its boundary:
 \[ SH_\ast^{\varnothing}(W)\cong H_{\ast+ n} (W,\partial W; \mathbb{Z}_2), \]
\[ SH_\ast^{\varnothing}(W)\cong H_{\ast+ n} (W,\partial W; \mathbb{Z}_2), \]
where  $2n=\dim W$. This is a straightforward consequence of the formal definition of the selective symplectic homology (Definition 3.4). Namely, it follows directly that
$2n=\dim W$. This is a straightforward consequence of the formal definition of the selective symplectic homology (Definition 3.4). Namely, it follows directly that  $SH_\ast ^\varnothing (W)$ is isomorphic to the Floer homology
$SH_\ast ^\varnothing (W)$ is isomorphic to the Floer homology  $HF_\ast (H)$ for a Hamiltonian
$HF_\ast (H)$ for a Hamiltonian  $H_t:\widehat {W}\to \operatorname {\mathbb {R}}$ whose slope
$H_t:\widehat {W}\to \operatorname {\mathbb {R}}$ whose slope  $\varepsilon >0$ is sufficiently small (smaller than any positive period of a closed Reeb orbit on
$\varepsilon >0$ is sufficiently small (smaller than any positive period of a closed Reeb orbit on  $\partial W$). For such a Hamiltonian
$\partial W$). For such a Hamiltonian  $H$, it is known (by a standard argument involving isomorphism of the Floer and Morse homologies for a
$H$, it is known (by a standard argument involving isomorphism of the Floer and Morse homologies for a  $C^2$ small Morse function) that
$C^2$ small Morse function) that  $HF_\ast (H)$ recovers
$HF_\ast (H)$ recovers  $H_{\ast +n}(W,\partial W;\mathbb {Z}_2)$.
$H_{\ast +n}(W,\partial W;\mathbb {Z}_2)$.
1.2 Canonical identification
Although not reflected in the notation, the group  $SH_\ast ^{\Omega }(W)$ depends only on the completion
$SH_\ast ^{\Omega }(W)$ depends only on the completion  $\widehat {W}$ and an open subset of the ideal contact boundary of
$\widehat {W}$ and an open subset of the ideal contact boundary of  $\widehat {W}$ (defined in [Reference Eliashberg, Kim and PolterovichEKP06, p. 1643]). More precisely,
$\widehat {W}$ (defined in [Reference Eliashberg, Kim and PolterovichEKP06, p. 1643]). More precisely,  $SH_\ast ^{\Omega }(W)= SH^{\Omega _f}_\ast (W^f),$ whenever the pairs
$SH_\ast ^{\Omega }(W)= SH^{\Omega _f}_\ast (W^f),$ whenever the pairs  $(W, \Omega )$ and
$(W, \Omega )$ and  $(W^f, \Omega _f)$ are
$(W^f, \Omega _f)$ are  $\lambda$-related in the sense of the following definition.
$\lambda$-related in the sense of the following definition.
Definition 1.6 Let  $(M,\lambda )$ be a Liouville manifold. Let
$(M,\lambda )$ be a Liouville manifold. Let  $\Sigma _1,\Sigma _2\subset M$ be two hypersurfaces in
$\Sigma _1,\Sigma _2\subset M$ be two hypersurfaces in  $M$ that are transverse to the Liouville vector field. The subsets
$M$ that are transverse to the Liouville vector field. The subsets  $\Omega _1\subset \Sigma _1$ and
$\Omega _1\subset \Sigma _1$ and  $\Omega _2\subset \Sigma _2$ are said to be
$\Omega _2\subset \Sigma _2$ are said to be  $\lambda$-related if each trajectory of the Liouville vector field either intersects both
$\lambda$-related if each trajectory of the Liouville vector field either intersects both  $\Omega _1$ and
$\Omega _1$ and  $\Omega _2$ or neither of them.
$\Omega _2$ or neither of them.
1.3 Continuation maps
To a pair  $\Omega _a\subset \Omega _b$ of open subsets of
$\Omega _a\subset \Omega _b$ of open subsets of  $\partial W$, one can associate a morphism
$\partial W$, one can associate a morphism
 \[ \Phi=\Phi_{\Omega_a}^{\Omega_b}: SH_\ast^{\Omega_a}(W)\to SH_\ast^{\Omega_b}(W), \]
\[ \Phi=\Phi_{\Omega_a}^{\Omega_b}: SH_\ast^{\Omega_a}(W)\to SH_\ast^{\Omega_b}(W), \]
called continuation map. The groups  $SH_\ast ^\Omega (W)$ together with the continuation maps form a directed system of groups indexed by open subsets of
$SH_\ast ^\Omega (W)$ together with the continuation maps form a directed system of groups indexed by open subsets of  $\partial W$. In other words,
$\partial W$. In other words,  $\Phi _{\Omega }^\Omega$ is equal to the identity and
$\Phi _{\Omega }^\Omega$ is equal to the identity and  $\Phi _{\Omega _b}^{\Omega _c}\circ \Phi _{\Omega _a}^{\Omega _b}=\Phi _{\Omega _a}^{\Omega _c}$.
$\Phi _{\Omega _b}^{\Omega _c}\circ \Phi _{\Omega _a}^{\Omega _b}=\Phi _{\Omega _a}^{\Omega _c}$.
1.4 Behaviour under direct limits
Let  $\Omega _k\subset \partial W$,
$\Omega _k\subset \partial W$,  $k\in \mathbb {N}$ be an increasing sequence of open subsets, i.e.
$k\in \mathbb {N}$ be an increasing sequence of open subsets, i.e.  $\Omega _k\subset \Omega _{k+1}$ for all
$\Omega _k\subset \Omega _{k+1}$ for all  $k\in \mathbb {N}$. Denote
$k\in \mathbb {N}$. Denote  $\Omega :=\bigcup _{k=1}^{\infty } \Omega _k$. Then, the map
$\Omega :=\bigcup _{k=1}^{\infty } \Omega _k$. Then, the map
 \[ \underset{k}{\lim_{\longrightarrow}}SH_\ast^{\Omega_k}(W) \to SH_\ast^{\Omega}(W), \]
\[ \underset{k}{\lim_{\longrightarrow}}SH_\ast^{\Omega_k}(W) \to SH_\ast^{\Omega}(W), \]
furnished by continuation maps is an isomorphism. The direct limit is taken with respect to continuation maps.
1.5 Conjugation isomorphisms
The conjugation isomorphism
 \[ \mathcal{C}(\psi) : SH_\ast^{\Omega_a}(W)\to SH_\ast^{\Omega_b}(W) \]
\[ \mathcal{C}(\psi) : SH_\ast^{\Omega_a}(W)\to SH_\ast^{\Omega_b}(W) \]
is associated with a symplectomorphism  $\psi :\widehat {W}\to \widehat {W}$, defined on the completion of
$\psi :\widehat {W}\to \widehat {W}$, defined on the completion of  $W$, that preserves the Liouville form outside of a compact set. With any such symplectomorphism
$W$, that preserves the Liouville form outside of a compact set. With any such symplectomorphism  $\psi$, one can associate a unique contactomorphism
$\psi$, one can associate a unique contactomorphism  $\varphi :\partial W\to \partial W$, called ideal restriction, such that
$\varphi :\partial W\to \partial W$, called ideal restriction, such that
 \begin{align*} \psi(x,r)= (\varphi(x), f(x)\cdot r) \end{align*}
\begin{align*} \psi(x,r)= (\varphi(x), f(x)\cdot r) \end{align*}
for  $r\in \operatorname {\mathbb {R}}^+$ large enough and for a certain positive function
$r\in \operatorname {\mathbb {R}}^+$ large enough and for a certain positive function  $f:\partial W\to \operatorname {\mathbb {R}}^+$. The set
$f:\partial W\to \operatorname {\mathbb {R}}^+$. The set  $\Omega _b$ is the image of
$\Omega _b$ is the image of  $\Omega _a$ under the contactomorphism
$\Omega _a$ under the contactomorphism  $\varphi ^{-1}:\partial W\to \partial W$. That is, the conjugation isomorphism has the following form
$\varphi ^{-1}:\partial W\to \partial W$. That is, the conjugation isomorphism has the following form
 \begin{align*} \mathcal{C}(\psi): SH_\ast^{\Omega}(W)\to SH_\ast^{\varphi^{-1}(\Omega)}(W), \end{align*}
\begin{align*} \mathcal{C}(\psi): SH_\ast^{\Omega}(W)\to SH_\ast^{\varphi^{-1}(\Omega)}(W), \end{align*}
where  $\varphi$ is the ideal restriction of
$\varphi$ is the ideal restriction of  $\psi$. As a consequence, the groups
$\psi$. As a consequence, the groups  $SH^{\Omega }_\ast (W)$ and
$SH^{\Omega }_\ast (W)$ and  $SH^{\varphi (\Omega )}_\ast (W)$ are isomorphic whenever the contactomorphism
$SH^{\varphi (\Omega )}_\ast (W)$ are isomorphic whenever the contactomorphism  $\varphi$ is the ideal restriction of some symplectomorphism
$\varphi$ is the ideal restriction of some symplectomorphism  $\psi :\widehat {W}\to \widehat {W}$ (that preserves the Liouville form outside of a compact set). If a contactomorphism of
$\psi :\widehat {W}\to \widehat {W}$ (that preserves the Liouville form outside of a compact set). If a contactomorphism of  $\partial W$ is contact isotopic to the identity, then it is equal to the ideal restriction of some symplectomorphism of
$\partial W$ is contact isotopic to the identity, then it is equal to the ideal restriction of some symplectomorphism of  $\widehat {W}$. Hence, if
$\widehat {W}$. Hence, if  $\Omega _a, \Omega _b\subset \partial W$ are two contact isotopic open subsets (i.e. there exists a contact isotopy
$\Omega _a, \Omega _b\subset \partial W$ are two contact isotopic open subsets (i.e. there exists a contact isotopy  $\varphi _t: \partial W\to \partial W$ such that
$\varphi _t: \partial W\to \partial W$ such that  $\varphi _0=\operatorname {id}$ and such that
$\varphi _0=\operatorname {id}$ and such that  $\varphi _1(\Omega _a)=\Omega _b$), then the groups
$\varphi _1(\Omega _a)=\Omega _b$), then the groups  $SH_\ast ^{\Omega _a}(W)$ and
$SH_\ast ^{\Omega _a}(W)$ and  $SH_\ast ^{\Omega _b}(W)$ are isomorphic. The conjugation isomorphisms behave well with respect to the continuation maps, as asserted by the next theorem.
$SH_\ast ^{\Omega _b}(W)$ are isomorphic. The conjugation isomorphisms behave well with respect to the continuation maps, as asserted by the next theorem.
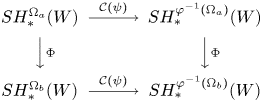
Theorem 1.7 Let  $W$ be a Liouville domain, let
$W$ be a Liouville domain, let  $\psi :\widehat {W}\to \widehat {W}$ be a symplectomorphism that preserves the Liouville form outside of a compact set, and let
$\psi :\widehat {W}\to \widehat {W}$ be a symplectomorphism that preserves the Liouville form outside of a compact set, and let  $\varphi :\partial W\to \partial W$ be the ideal restriction of
$\varphi :\partial W\to \partial W$ be the ideal restriction of  $\psi$. Let
$\psi$. Let  $\Omega _a\subset \Omega _b\subset \partial W$ be open subsets. Then, the following diagram, consisting of conjugation isomorphisms and continuation maps, commutes.
$\Omega _a\subset \Omega _b\subset \partial W$ be open subsets. Then, the following diagram, consisting of conjugation isomorphisms and continuation maps, commutes.
Applications
The selective symplectic homology is envisioned as a tool for studying contact geometry and dynamics of Liouville fillable contact manifolds. The present paper shows how it can be used to prove contact non-squeezing type of results. This is illustrated by the following abstract observation.
Theorem 1.8 Let  $W$ be a Liouville domain and let
$W$ be a Liouville domain and let  $\Omega _a, \Omega _b\subset \partial W$ be open subsets. If the rank of the continuation map
$\Omega _a, \Omega _b\subset \partial W$ be open subsets. If the rank of the continuation map  $SH_\ast ^{\Omega _b}(W)\to SH_\ast (W)$ is (strictly) greater than the rank of the continuation map
$SH_\ast ^{\Omega _b}(W)\to SH_\ast (W)$ is (strictly) greater than the rank of the continuation map  $SH_\ast ^{\Omega _a}(W)\to SH_\ast (W),$ then
$SH_\ast ^{\Omega _a}(W)\to SH_\ast (W),$ then  $\Omega _b$ cannot be contactly squeezed into
$\Omega _b$ cannot be contactly squeezed into  $\Omega _a$.
$\Omega _a$.
The theory of selective symplectic homology has rich algebraic structure that is beyond the scope of the present paper. For instance:
1. one can construct a persistent module associated to an open subset of a contact manifold;
2. topological quantum field theory operations are well defined on
 $SH_\ast ^\Omega (W)$;
$SH_\ast ^\Omega (W)$;3. it is possible to define transfer morphisms for selective symplectic homology in analogy to Viterbo's transfer morphisms for symplectic homology;
4. there exist positive selective symplectic homology,
$\mathbb {S}^1$-equivariant selective symplectic homology, positive $\mathbb {S}^1$-equivariant selective symplectic homology, etc.



The structure of the paper
The paper is organized as follows. Section 2 recalls the definition of Liouville domains and construction of the Hamiltonian-loop Floer homology. Sections 3–5 define the selective symplectic homology and derive its properties. Sections 6–8 contain proofs of the applications to the contact non-squeezing and necessary computations. Section 9 discusses isomorphisms of contact Floer homology induced by families of contactomorphisms indexed by a disc.
2. Preliminaries
2.1 Liouville manifolds
This section recalls the notions of a Liouville domain and a Liouville manifold of finite type. Liouville manifolds (of finite type) play the role of an ambient space in this paper. The selective symplectic homology is built from objects on a Liouville manifold of finite type.
Definition 2.1 A Liouville manifold of finite type is an open manifold  $M$ together with a 1-form
$M$ together with a 1-form  $\lambda$ on it such that the following conditions hold.
$\lambda$ on it such that the following conditions hold.
1. The 2-form
$d\lambda$ is a symplectic form on $M.$2. There exist a contact manifold
$\Sigma$ with a contact form $\alpha$ and a codimension-0 embedding $\iota : \Sigma \times \operatorname {\mathbb {R}}^+\to M$ such that $M\setminus \iota (\Sigma \times \operatorname {\mathbb {R}}^+)$ is a compact set, and such that $\iota ^\ast \lambda =r\cdot \alpha,$ where $r$ stands for the $\operatorname {\mathbb {R}}^+$ coordinate.









We will refer to the map  $\iota$ as a conical end of the Liouville manifold
$\iota$ as a conical end of the Liouville manifold  $M$. With slight abuse of terminology, the set
$M$. With slight abuse of terminology, the set  $\iota (\Sigma \times \operatorname {\mathbb {R}}^+)$ will also be called conical end. A conical end is not unique.
$\iota (\Sigma \times \operatorname {\mathbb {R}}^+)$ will also be called conical end. A conical end is not unique.
The Liouville vector field,  $X_\lambda,$ of the Liouville manifold
$X_\lambda,$ of the Liouville manifold  $(M, \lambda )$ of finite type is the complete vector field defined by
$(M, \lambda )$ of finite type is the complete vector field defined by  $d\lambda (X_\lambda, \cdot )=\lambda$. If
$d\lambda (X_\lambda, \cdot )=\lambda$. If  $\Sigma \subset M$ is a closed hypersurface that is transverse to the Liouville vector field
$\Sigma \subset M$ is a closed hypersurface that is transverse to the Liouville vector field  $X_\lambda,$ then
$X_\lambda,$ then  $\lambda |_{\Sigma }$ is a contact form on
$\lambda |_{\Sigma }$ is a contact form on  $\Sigma$ and there exists a unique codimension-0 embedding
$\Sigma$ and there exists a unique codimension-0 embedding  $\iota _\Sigma : \Sigma \times \operatorname {\mathbb {R}}^+\to M$ such that
$\iota _\Sigma : \Sigma \times \operatorname {\mathbb {R}}^+\to M$ such that  $\iota _\Sigma (x,1)=x$ and such that
$\iota _\Sigma (x,1)=x$ and such that  $\iota _\Sigma ^\ast \lambda = r\cdot \lambda |_{\Sigma }$.
$\iota _\Sigma ^\ast \lambda = r\cdot \lambda |_{\Sigma }$.
The notion of a Liouville manifold of finite type is closely related to that of a Liouville domain.
Definition 2.2 A Liouville domain is a compact manifold  $W$ (with boundary) together with a 1-form
$W$ (with boundary) together with a 1-form  $\lambda$ such that:
$\lambda$ such that:
1.
$d\lambda$ is a symplectic form on $W$;2. the Liouville vector field
$X_\lambda$ points transversely outwards at the boundary.



The Liouville vector field on a Liouville domain  $(W,\lambda )$ is not complete. The completion of the Liouville domain is the Liouville manifold
$(W,\lambda )$ is not complete. The completion of the Liouville domain is the Liouville manifold  $(\widehat {W},\widehat {\lambda })$ of finite type obtained by extending the integral curves of the vector field
$(\widehat {W},\widehat {\lambda })$ of finite type obtained by extending the integral curves of the vector field  $X_\lambda$ towards
$X_\lambda$ towards  $+\infty$. Explicitly, as a topological space,
$+\infty$. Explicitly, as a topological space,
 \[ \widehat{W} := W \bigcup_{\partial}(\partial W)\times [1,+\infty). \]
\[ \widehat{W} := W \bigcup_{\partial}(\partial W)\times [1,+\infty). \]
The manifolds  $(\partial W)\times [1,+\infty )$ and
$(\partial W)\times [1,+\infty )$ and  $W$ are glued along the boundary via the map
$W$ are glued along the boundary via the map
 \[ \partial W\times\{1\}\to\partial W: (x,1)\mapsto x. \]
\[ \partial W\times\{1\}\to\partial W: (x,1)\mapsto x. \]
The completion  $\widehat {W}$ is endowed with the unique smooth structure such that the natural inclusions
$\widehat {W}$ is endowed with the unique smooth structure such that the natural inclusions  $W\hookrightarrow \widehat {W}$ and
$W\hookrightarrow \widehat {W}$ and  $\partial W\times [1, +\infty )\hookrightarrow \widehat {W}$ are smooth embeddings, and such that the vector field
$\partial W\times [1, +\infty )\hookrightarrow \widehat {W}$ are smooth embeddings, and such that the vector field  $X_\lambda$ extends smoothly to
$X_\lambda$ extends smoothly to  $\partial W\times [1,+\infty )$ by the vector field
$\partial W\times [1,+\infty )$ by the vector field  $r\partial _r.$ (Here, we tacitly identified
$r\partial _r.$ (Here, we tacitly identified  $\partial W\times [1,+\infty )$ and
$\partial W\times [1,+\infty )$ and  $W$ with their images under the natural inclusions.) The 1-form
$W$ with their images under the natural inclusions.) The 1-form  $\widehat {\lambda }$ is obtained by extending the 1-form
$\widehat {\lambda }$ is obtained by extending the 1-form  $\lambda$ to
$\lambda$ to  $\partial W\times [1,+\infty )$ by
$\partial W\times [1,+\infty )$ by  $r\cdot \lambda |_{\partial W.}$ The completion of a Liouville domain is a Liouville manifold of finite type. And, the other way around, every Liouville manifold of finite type is the completion of some Liouville domain.
$r\cdot \lambda |_{\partial W.}$ The completion of a Liouville domain is a Liouville manifold of finite type. And, the other way around, every Liouville manifold of finite type is the completion of some Liouville domain.
Let  $M$ be a Liouville manifold of finite type, let
$M$ be a Liouville manifold of finite type, let  $W\subset M$ be a codimension-0 Liouville subdomain, and let
$W\subset M$ be a codimension-0 Liouville subdomain, and let  $f:\partial W\to \operatorname {\mathbb {R}}^+$ be a smooth function. The completion
$f:\partial W\to \operatorname {\mathbb {R}}^+$ be a smooth function. The completion  $\widehat {W}$ can be seen as a subset of
$\widehat {W}$ can be seen as a subset of  $M$. Throughout the paper,
$M$. Throughout the paper,  $W^f$ denotes the subset of
$W^f$ denotes the subset of  $M$ defined by
$M$ defined by
 \[ W^f:=\widehat{W}\setminus\iota_{\partial W}(\{f(x)\cdot r>1\}). \]
\[ W^f:=\widehat{W}\setminus\iota_{\partial W}(\{f(x)\cdot r>1\}). \]
Here,  $\{f(x)\cdot r>1\}$ stands for
$\{f(x)\cdot r>1\}$ stands for  $\{(x,r)\in \partial W\times \operatorname {\mathbb {R}}^+\,|\, f(x)\cdot r>1\}$. The set
$\{(x,r)\in \partial W\times \operatorname {\mathbb {R}}^+\,|\, f(x)\cdot r>1\}$. The set  $W^f$ is a codimension-0 Liouville subdomain in its own right, and the completions of
$W^f$ is a codimension-0 Liouville subdomain in its own right, and the completions of  $W$ and
$W$ and  $W^f$ can be identified.
$W^f$ can be identified.
2.2 Floer theory
In this section, we recall the definition of the Floer homology for a contact Hamiltonian,  $HF_\ast (W,h)$. A contact Hamiltonian is called admissible if it does not have any
$HF_\ast (W,h)$. A contact Hamiltonian is called admissible if it does not have any  $1$-periodic orbits and if it is 1-periodic in the time variable. The group
$1$-periodic orbits and if it is 1-periodic in the time variable. The group  $HF_\ast (W,h)$ is associated to a Liouville domain
$HF_\ast (W,h)$ is associated to a Liouville domain  $(W,\lambda )$ and to an admissible contact Hamiltonian
$(W,\lambda )$ and to an admissible contact Hamiltonian  $h_t:\partial W\to \operatorname {\mathbb {R}}$ that is defined on the boundary of
$h_t:\partial W\to \operatorname {\mathbb {R}}$ that is defined on the boundary of  $W$.
$W$.
The Floer homology for contact Hamiltonians was introduced in [Reference Merry and UljarevićMU19] by Merry and the author. It relies heavily on the Hamiltonian loop Floer homology [Reference FloerFlo89] and symplectic homology [Reference Floer and HoferFH94, Reference Floer, Hofer and WysockiFHW94, Reference Cieliebak, Floer and HoferCFH95, Reference Cieliebak, Floer, Hofer and WysockiCFHW96, Reference ViterboVit99, Reference ViterboVit18], especially the version of symplectic homology by Viterbo [Reference ViterboVit99].
2.2.1 Auxiliary data
Let  $(W,\lambda )$ be a Liouville domain, and let
$(W,\lambda )$ be a Liouville domain, and let  $h_t:\partial W\to \operatorname {\mathbb {R}}$ be an admissible contact Hamiltonian. The group
$h_t:\partial W\to \operatorname {\mathbb {R}}$ be an admissible contact Hamiltonian. The group  $HF_\ast (W, h)$ is defined as the Hamiltonian loop Floer homology,
$HF_\ast (W, h)$ is defined as the Hamiltonian loop Floer homology,  $HF_\ast (H,J),$ associated to a Hamiltonian
$HF_\ast (H,J),$ associated to a Hamiltonian  $H$ and an almost complex structure
$H$ and an almost complex structure  $J$. Both
$J$. Both  $H$ and
$H$ and  $J$ are objects on the completion
$J$ are objects on the completion  $\widehat {W}=:M$ of the Liouville domain
$\widehat {W}=:M$ of the Liouville domain  $W$. Before stating the precise conditions that
$W$. Before stating the precise conditions that  $H$ and
$H$ and  $J$ are assumed to satisfy, we define the set
$J$ are assumed to satisfy, we define the set  $\mathcal {J}(\Sigma, \alpha )$ of almost complex structures of SFT type. Let
$\mathcal {J}(\Sigma, \alpha )$ of almost complex structures of SFT type. Let  $\Sigma$ be a contact manifold with a contact form
$\Sigma$ be a contact manifold with a contact form  $\alpha$. The set
$\alpha$. The set  $\mathcal {J}(\Sigma, \alpha )$ (or simply
$\mathcal {J}(\Sigma, \alpha )$ (or simply  $\mathcal {J}(\Sigma )$ when it is clear from the context what the contact form is equal to) is the set of almost complex structures
$\mathcal {J}(\Sigma )$ when it is clear from the context what the contact form is equal to) is the set of almost complex structures  $J$ on the symplectization
$J$ on the symplectization  $\Sigma \times \operatorname {\mathbb {R}}^+$ such that:
$\Sigma \times \operatorname {\mathbb {R}}^+$ such that:
•
$J$ is invariant under the $\operatorname {\mathbb {R}}^+$ action on $\Sigma \times \operatorname {\mathbb {R}}^+$;•
$J(r\partial _r)= R_\alpha$, where $R_\alpha$ is the Reeb vector field on $\Sigma$ with respect to the contact form $\alpha$;• the contact distribution
$\xi :=\ker \alpha$ is invariant under $J$ and $J|_{\xi }$ is a compatible complex structure on the symplectic vector bundle $(\xi, d\alpha )\to \Sigma$.











The list of the conditions for  $(H,J)$ follows.
$(H,J)$ follows.
1. (Conditions on the conical end.) There exist a positive number
$a\in \operatorname {\mathbb {R}}^+$ and a constant $c\in \operatorname {\mathbb {R}}$ such that
for all\begin{align*} H_t\circ\iota_{\partial W}(x,r)= r\cdot h(x) + c, \end{align*}
$t\in \operatorname {\mathbb {R}}$ and $(x,r)\in \partial W\times [a,+\infty ),$ and such that $\iota _{\partial W}^\ast J_t$ coincides with an element of $\mathcal {J}(\partial W)$ on $\partial W\times [a,+\infty )$ for all $t\in \operatorname {\mathbb {R}}$. Here, $\iota _{\partial W}: \partial W\times \operatorname {\mathbb {R}}^+\to M$ is the conical end of $M$ associated to $\partial W.$2. (One-periodicity.) For all
$t\in \operatorname {\mathbb {R}},$ $H_{t+1}=H_t$ and $J_{t+1}=J_t$.3. (
$d\widehat {\lambda }$-compatibility.) The tensor $d\widehat {\lambda }(\cdot, J_t\cdot )$ is a Riemannian metric on $M$ for all $t\in \operatorname {\mathbb {R}}$.



















The pair  $(H,J)$ that satisfies the conditions above is called Floer data (for the contact Hamiltonian
$(H,J)$ that satisfies the conditions above is called Floer data (for the contact Hamiltonian  $h$ and the Liouville domain
$h$ and the Liouville domain  $(W,\lambda )$). Floer data
$(W,\lambda )$). Floer data  $(H,J)$ is called regular if, additionally, the following two conditions hold.
$(H,J)$ is called regular if, additionally, the following two conditions hold.
4. (Non-degeneracy.) The linear map
is invertible for all fixed points\[ d\phi^H_1(x)-\operatorname{id} : T_xM\to T_xM \]
$x$ of $\phi _1^H.$5. (Regularity.) The linearized operator of the Floer equation
is surjective.\[ u:\operatorname{\mathbb{R}}\times (\operatorname{\mathbb{R}}/\mathbb{Z})\to M,\quad \partial_s u+ J_t(u)(\partial_t u- X_{H_t}(u))=0 \]




2.2.2 Floer complex
Let  $(H,J)$ be regular Floer data. The Floer complex,
$(H,J)$ be regular Floer data. The Floer complex,  $CF_\ast (H,J),$ is built up on the contractible 1-periodic orbits of the Hamiltonian
$CF_\ast (H,J),$ is built up on the contractible 1-periodic orbits of the Hamiltonian  $H$. For every 1-periodic orbit
$H$. For every 1-periodic orbit  $\gamma$ of the Hamiltonian
$\gamma$ of the Hamiltonian  $H,$ there exists a fixed point
$H,$ there exists a fixed point  $x$ of
$x$ of  $\phi ^H_1$ such that
$\phi ^H_1$ such that  $\gamma (t)=\phi ^H_t(x)$. The degree,
$\gamma (t)=\phi ^H_t(x)$. The degree,  $\deg \gamma =\deg _H\gamma,$ of a contractible 1-periodic orbit
$\deg \gamma =\deg _H\gamma,$ of a contractible 1-periodic orbit  $\gamma =\phi ^H_\cdot (x)$ of the Hamiltonian
$\gamma =\phi ^H_\cdot (x)$ of the Hamiltonian  $H$ is defined to be the negative Conley–Zehnder index of the path of symplectic matrices that is obtained from
$H$ is defined to be the negative Conley–Zehnder index of the path of symplectic matrices that is obtained from  $d\phi ^H_t(x)$ by trivializing
$d\phi ^H_t(x)$ by trivializing  $TM$ along a disc that is bounded by
$TM$ along a disc that is bounded by  $\gamma$ (see [Reference SalamonSal99] for details concerning the Conley–Zehnder index). Different choices of the capping disc can lead to different values of the degree, however they all differ by an even multiple of the minimal Chern number
$\gamma$ (see [Reference SalamonSal99] for details concerning the Conley–Zehnder index). Different choices of the capping disc can lead to different values of the degree, however they all differ by an even multiple of the minimal Chern number
 \[ N:=\min \{ c_1(u)>0\,|\, u:\mathbb{S}^2\to M \}. \]
\[ N:=\min \{ c_1(u)>0\,|\, u:\mathbb{S}^2\to M \}. \]
Therefore,  $\deg \gamma$ is well defined as an element of
$\deg \gamma$ is well defined as an element of  $\mathbb {Z}_{2N}$ (but not as an element of
$\mathbb {Z}_{2N}$ (but not as an element of  $\mathbb {Z},$ in general). The Floer chain complex as a group is defined by
$\mathbb {Z},$ in general). The Floer chain complex as a group is defined by
 \[ CF_k(H,J):=\bigoplus_{\deg \gamma=k} \mathbb{Z}_2\langle\gamma\rangle. \]
\[ CF_k(H,J):=\bigoplus_{\deg \gamma=k} \mathbb{Z}_2\langle\gamma\rangle. \]
Since the Floer data  $(H,J)$ is regular, the set
$(H,J)$ is regular, the set  $\mathcal {M}(H,J, \gamma ^-, \gamma ^+)$ of the solutions
$\mathcal {M}(H,J, \gamma ^-, \gamma ^+)$ of the solutions  $u:\operatorname {\mathbb {R}}\times (\operatorname {\mathbb {R}}/\mathbb {Z})\to M$ of the Floer equation
$u:\operatorname {\mathbb {R}}\times (\operatorname {\mathbb {R}}/\mathbb {Z})\to M$ of the Floer equation
 \[ \partial_s u + J_t(u)(\partial_t u - X_{H_t}(u))=0 \]
\[ \partial_s u + J_t(u)(\partial_t u - X_{H_t}(u))=0 \]
that join two 1-periodic orbits  $\gamma ^-$ and
$\gamma ^-$ and  $\gamma ^+$ of
$\gamma ^+$ of  $H$ (i.e.
$H$ (i.e.  $\lim _{s\mapsto \pm \infty } u(s,t)=\gamma ^\pm (t)$) is a finite-dimensional manifold (components of which might have different dimensions). There is a natural
$\lim _{s\mapsto \pm \infty } u(s,t)=\gamma ^\pm (t)$) is a finite-dimensional manifold (components of which might have different dimensions). There is a natural  $\operatorname {\mathbb {R}}$-action on
$\operatorname {\mathbb {R}}$-action on  $\mathcal {M}(H,J, \gamma ^-, \gamma ^+)$ given by
$\mathcal {M}(H,J, \gamma ^-, \gamma ^+)$ given by
 \[ \operatorname{\mathbb{R}} \times \mathcal{M}(H,J, \gamma^-, \gamma^+) \mapsto \mathcal{M}(H,J, \gamma^-, \gamma^+): (a, u)\mapsto u(\cdot +a, \cdot). \]
\[ \operatorname{\mathbb{R}} \times \mathcal{M}(H,J, \gamma^-, \gamma^+) \mapsto \mathcal{M}(H,J, \gamma^-, \gamma^+): (a, u)\mapsto u(\cdot +a, \cdot). \]
The quotient
 \begin{align*} \tilde{\mathcal{M}}(H,J,\gamma^-,\gamma^+):=\mathcal{M}(H,J,\gamma^-,\gamma^+)/\mathbb{R} \end{align*}
\begin{align*} \tilde{\mathcal{M}}(H,J,\gamma^-,\gamma^+):=\mathcal{M}(H,J,\gamma^-,\gamma^+)/\mathbb{R} \end{align*}
of  $\mathcal {M}(H,J,\gamma ^-,\gamma ^+)$ by this action is also a finite-dimensional manifold. Denote by
$\mathcal {M}(H,J,\gamma ^-,\gamma ^+)$ by this action is also a finite-dimensional manifold. Denote by  $n(\gamma ^-, \gamma ^+)=n(H,J, \gamma ^-, \gamma ^+)\in \mathbb {Z}_2$ the parity of the number of 0-dimensional components of
$n(\gamma ^-, \gamma ^+)=n(H,J, \gamma ^-, \gamma ^+)\in \mathbb {Z}_2$ the parity of the number of 0-dimensional components of  $\tilde {\mathcal {M}}(H,J,\gamma ^-,\gamma ^+)$. The boundary map
$\tilde {\mathcal {M}}(H,J,\gamma ^-,\gamma ^+)$. The boundary map
 \[ \partial : CF_{k+1}(H,J)\to CF_k(H,J) \]
\[ \partial : CF_{k+1}(H,J)\to CF_k(H,J) \]
is defined on the generators by
 \begin{align} \partial \langle \gamma\rangle:=\sum_{\tilde{\gamma}} n(\gamma,\tilde{\gamma})\langle \tilde{\gamma} \rangle. \end{align}
\begin{align} \partial \langle \gamma\rangle:=\sum_{\tilde{\gamma}} n(\gamma,\tilde{\gamma})\langle \tilde{\gamma} \rangle. \end{align}
If  $\deg \gamma \not =\deg \tilde {\gamma }+1$, there are no 0-dimensional components of
$\deg \gamma \not =\deg \tilde {\gamma }+1$, there are no 0-dimensional components of  $\tilde {\mathcal {M}}(H,J,\gamma ^-,\gamma ^+)$ and, therefore,
$\tilde {\mathcal {M}}(H,J,\gamma ^-,\gamma ^+)$ and, therefore,  $n(\gamma,\tilde {\gamma })=0$. Hence, the sum in (2.1) can be taken only over
$n(\gamma,\tilde {\gamma })=0$. Hence, the sum in (2.1) can be taken only over  $\tilde {\gamma }$ that satisfy
$\tilde {\gamma }$ that satisfy  $\operatorname {deg}\tilde {\gamma }=\operatorname {deg}\gamma -1$. The homology of the chain complex
$\operatorname {deg}\tilde {\gamma }=\operatorname {deg}\gamma -1$. The homology of the chain complex  $CF_\ast (H,J)$ is denoted by
$CF_\ast (H,J)$ is denoted by  $HF_\ast (H,J)$.
$HF_\ast (H,J)$.
2.2.3 Continuation maps
Continuation maps compare Floer homologies for different choices of Floer data. They are associated to generic monotone homotopies of Floer data that join two given instances of Floer data. We refer to these homotopies as continuation data.
Let  $(H^-, J^-)$ and
$(H^-, J^-)$ and  $(H^+, J^+)$ be regular Floer data. The continuation data from
$(H^+, J^+)$ be regular Floer data. The continuation data from  $(H^-, J^-)$ to
$(H^-, J^-)$ to  $(H^+, J^+)$ is a pair
$(H^+, J^+)$ is a pair  $(\{H_{s,t}\}, \{J_{s,t}\})$ that consists of an
$(\{H_{s,t}\}, \{J_{s,t}\})$ that consists of an  $s$-dependent Hamiltonian
$s$-dependent Hamiltonian  $H_{s,t}:M\to \operatorname {\mathbb {R}}$ and a family
$H_{s,t}:M\to \operatorname {\mathbb {R}}$ and a family  $J_{s,t}$ of almost complex structures on
$J_{s,t}$ of almost complex structures on  $M$ such that the following conditions hold.
$M$ such that the following conditions hold.
1. (Homotopy of Floer data.) For all
$s\in \operatorname {\mathbb {R}},$ the pair $(H_{s,\cdot }, J_{s,\cdot })$ is Floer data (not necessarily regular) for some contact Hamiltonian.2. (Monotonicity.) There exists
$a\in \operatorname {\mathbb {R}}^+$ such that $\partial _s H_{s,t}(x)\geqslant 0,$ for all $s,t\in \operatorname {\mathbb {R}}$ and $x\in \iota _{\partial W}(\partial W\times [a,+\infty )).$3. (
$s$-independence at the ends.) There exists $b\in \operatorname {\mathbb {R}}^+$ such that $H_{s,t}(x)= H^{\pm }_t(x),$ for all $t\in \operatorname {\mathbb {R}}$ and $x\in M$, if $\pm s\in [b,+\infty )$.












Continuation data  $(\{H_{s,t}\},\{J_{s,t}\})$ is called regular if the linearized operator of the
$(\{H_{s,t}\},\{J_{s,t}\})$ is called regular if the linearized operator of the  $s$-dependent Floer equation
$s$-dependent Floer equation
 \[ u:\operatorname{\mathbb{R}}\times (\operatorname{\mathbb{R}}/\mathbb{Z})\to M,\quad \partial_s u+ J_{s,t}(u)(\partial_t u- X_{H_{s,t}}(u))=0 \]
\[ u:\operatorname{\mathbb{R}}\times (\operatorname{\mathbb{R}}/\mathbb{Z})\to M,\quad \partial_s u+ J_{s,t}(u)(\partial_t u- X_{H_{s,t}}(u))=0 \]
is surjective.
Given regular continuation data  $(\{H_{s,t}\}, \{J_{s,t}\})$ from
$(\{H_{s,t}\}, \{J_{s,t}\})$ from  $(H^-, J^-)$ to
$(H^-, J^-)$ to  $(H^+, J^+)$ and 1-periodic orbits
$(H^+, J^+)$ and 1-periodic orbits  $\gamma ^-$ and
$\gamma ^-$ and  $\gamma ^+$ of
$\gamma ^+$ of  $H^-$ and
$H^-$ and  $H^+,$ respectively, the set of the solutions
$H^+,$ respectively, the set of the solutions  $u:\operatorname {\mathbb {R}}\times (\operatorname {\mathbb {R}}/\mathbb {Z})\to M$ of the problem
$u:\operatorname {\mathbb {R}}\times (\operatorname {\mathbb {R}}/\mathbb {Z})\to M$ of the problem
 \begin{align*} & \partial_s u + J_{s,t} (u) (\partial_t u - X_{H_{s,t}}(u))=0,\\ & \lim_{s\to\pm\infty} u(s,t)= \gamma^\pm(t) \end{align*}
\begin{align*} & \partial_s u + J_{s,t} (u) (\partial_t u - X_{H_{s,t}}(u))=0,\\ & \lim_{s\to\pm\infty} u(s,t)= \gamma^\pm(t) \end{align*}
is a finite-dimensional manifold. Its 0-dimensional part is compact and, therefore, a finite set. Denote by  $m(\gamma ^-,\gamma ^+)$ the number modulo 2 of the 0-dimensional components of this manifold. The continuation map
$m(\gamma ^-,\gamma ^+)$ the number modulo 2 of the 0-dimensional components of this manifold. The continuation map
 \[ \Phi= \Phi(\{H_{s,t}\}, \{J_{s,t}\})\quad:\quad CF_\ast(H^-, J^-)\to CF_\ast(H^+, J^+) \]
\[ \Phi= \Phi(\{H_{s,t}\}, \{J_{s,t}\})\quad:\quad CF_\ast(H^-, J^-)\to CF_\ast(H^+, J^+) \]
is the chain map defined on the generators by
 \[ \Phi(\gamma^-):=\sum_{\gamma^+} m(\gamma^-, \gamma^+)\langle \gamma^+\rangle. \]
\[ \Phi(\gamma^-):=\sum_{\gamma^+} m(\gamma^-, \gamma^+)\langle \gamma^+\rangle. \]
The map  $HF_\ast (H^-, J^-)\to HF_\ast (H^+, J^+)$ induced by a continuation map on the homology level (this map is also called continuation map) does not depend on the choice of continuation data from
$HF_\ast (H^-, J^-)\to HF_\ast (H^+, J^+)$ induced by a continuation map on the homology level (this map is also called continuation map) does not depend on the choice of continuation data from  $(H^-, J^-)$ to
$(H^-, J^-)$ to  $(H^+, J^+)$.
$(H^+, J^+)$.
The groups  $HF_\ast (H,J)$ together with the continuation maps form a directed system of groups. As a consequence, the groups
$HF_\ast (H,J)$ together with the continuation maps form a directed system of groups. As a consequence, the groups  $HF_\ast (H,J)$ and
$HF_\ast (H,J)$ and  $HF_\ast (H', J')$ are canonically isomorphic whenever
$HF_\ast (H', J')$ are canonically isomorphic whenever  $(H,J)$ and
$(H,J)$ and  $(H',J')$ are (regular) Floer data for the same admissible contact Hamiltonian. Therefore, the Floer homology
$(H',J')$ are (regular) Floer data for the same admissible contact Hamiltonian. Therefore, the Floer homology  $HF_\ast (h)= HF_\ast (W,h)$ for an admissible contact Hamiltonian
$HF_\ast (h)= HF_\ast (W,h)$ for an admissible contact Hamiltonian  $h_t:\partial W\to \operatorname {\mathbb {R}}$ is well defined. The continuation maps carry over to Floer homology for contact Hamiltonians. Due to the ‘monotonicity’ condition for the continuation data, the continuation map
$h_t:\partial W\to \operatorname {\mathbb {R}}$ is well defined. The continuation maps carry over to Floer homology for contact Hamiltonians. Due to the ‘monotonicity’ condition for the continuation data, the continuation map  $HF_\ast (h)\to HF_\ast (h')$ is not well defined unless
$HF_\ast (h)\to HF_\ast (h')$ is not well defined unless  $h_t,h'_t:\partial W\to \operatorname {\mathbb {R}}$ are admissible contact Hamiltonians such that
$h_t,h'_t:\partial W\to \operatorname {\mathbb {R}}$ are admissible contact Hamiltonians such that  $h\leqslant h',$ pointwise.
$h\leqslant h',$ pointwise.
For a positive smooth function  $f:\partial W\to \operatorname {\mathbb {R}}^+$, the completions of the Liouville domains
$f:\partial W\to \operatorname {\mathbb {R}}^+$, the completions of the Liouville domains  $W$ and
$W$ and  $W^f$ can be naturally identified. If a Hamiltonian
$W^f$ can be naturally identified. If a Hamiltonian  $H: \widehat {W}= \widehat {W^f}\to \operatorname {\mathbb {R}}$ has the slope equal to
$H: \widehat {W}= \widehat {W^f}\to \operatorname {\mathbb {R}}$ has the slope equal to  $h$ with respect to the Liouville domain
$h$ with respect to the Liouville domain  $W^f$, then it has the slope equal to
$W^f$, then it has the slope equal to  $f\cdot h$ with respect to the Liouville domain
$f\cdot h$ with respect to the Liouville domain  $W$. Therefore, the groups
$W$. Therefore, the groups  $HF_\ast (W^f, h)$ and
$HF_\ast (W^f, h)$ and  $HF_\ast (W, f\cdot h)$ are canonically isomorphic. Here, we tacitly identified
$HF_\ast (W, f\cdot h)$ are canonically isomorphic. Here, we tacitly identified  $\partial W$ and
$\partial W$ and  $\partial W^f$ via the contactomorphism furnished by the Liouville vector field, and regarded
$\partial W^f$ via the contactomorphism furnished by the Liouville vector field, and regarded  $h$ as both the function on
$h$ as both the function on  $\partial W$ and
$\partial W$ and  $\partial W^f$.
$\partial W^f$.
3. Selective symplectic homology
This section defines formally the selective symplectic homology  $SH_\ast ^{\Omega }(W)$. To this end, two sets of smooth functions on
$SH_\ast ^{\Omega }(W)$. To this end, two sets of smooth functions on  $\partial W$ are introduced:
$\partial W$ are introduced:  $\mathcal {H}_\Omega (\partial W)$ and
$\mathcal {H}_\Omega (\partial W)$ and  $\Pi (h)$. The set
$\Pi (h)$. The set  $\mathcal {H}_\Omega (\partial W)$ consists of certain non-negative smooth functions on
$\mathcal {H}_\Omega (\partial W)$ consists of certain non-negative smooth functions on  $\partial W$, and
$\partial W$, and  $\Pi (h)$ is a set associated to
$\Pi (h)$ is a set associated to  $h\in \mathcal {H}_\Omega (\partial W)$ that can be thought of as the set of perturbations.
$h\in \mathcal {H}_\Omega (\partial W)$ that can be thought of as the set of perturbations.
Definition 3.1 Let  $\Sigma$ be a closed contact manifold with a contact form
$\Sigma$ be a closed contact manifold with a contact form  $\alpha,$ and let
$\alpha,$ and let  $\Omega \subset \Sigma$ be an open subset. Denote by
$\Omega \subset \Sigma$ be an open subset. Denote by  $\mathcal {H}_\Omega (\Sigma )= \mathcal {H}_\Omega (\Sigma,\alpha )$ the set of smooth (
$\mathcal {H}_\Omega (\Sigma )= \mathcal {H}_\Omega (\Sigma,\alpha )$ the set of smooth ( $C^\infty$) autonomous contact Hamiltonians
$C^\infty$) autonomous contact Hamiltonians  $h:\Sigma \to [0,+\infty )$ such that:
$h:\Sigma \to [0,+\infty )$ such that:
1.
$\operatorname {supp} h\subset \Omega$;2.
$dY^h(p)=0$ for all $p\in \Sigma$ such that $h(p)=0$;3. the 1-periodic orbits of
$h$ are constant.





In the definition above,  $Y^h$ denotes the contact vector field of the contact Hamiltonian
$Y^h$ denotes the contact vector field of the contact Hamiltonian  $h$. More precisely, the vector field
$h$. More precisely, the vector field  $Y^h$ is determined by the following relations
$Y^h$ is determined by the following relations
 \begin{align*} & \alpha(Y^h)=-h,\\ & d\alpha(Y^h, \cdot)= dh- dh(R)\cdot \alpha, \end{align*}
\begin{align*} & \alpha(Y^h)=-h,\\ & d\alpha(Y^h, \cdot)= dh- dh(R)\cdot \alpha, \end{align*}
where  $R$ stands for the Reeb vector field with respect to
$R$ stands for the Reeb vector field with respect to  $\alpha$. The condition
$\alpha$. The condition  $dY^h(p)=0$ holds for
$dY^h(p)=0$ holds for  $p\in h^{-1}(0)$ if, for instance, the Hessian of
$p\in h^{-1}(0)$ if, for instance, the Hessian of  $h$ is equal to 0 at the point
$h$ is equal to 0 at the point  $p$. The set
$p$. The set  $\mathcal {H}_\Omega (\Sigma )$ is non-empty.
$\mathcal {H}_\Omega (\Sigma )$ is non-empty.
Definition 3.2 Let  $\Sigma$ be a closed contact manifold with a contact form
$\Sigma$ be a closed contact manifold with a contact form  $\alpha,$ let
$\alpha,$ let  $\Omega \subset \Sigma$ be an open subset, and let
$\Omega \subset \Sigma$ be an open subset, and let  $h\in \mathcal {H}_\Omega (\Sigma )$. Denote by
$h\in \mathcal {H}_\Omega (\Sigma )$. Denote by  $\Pi (h)$ the set of smooth positive functions
$\Pi (h)$ the set of smooth positive functions  $f:\Sigma \to \operatorname {\mathbb {R}}^+$ such that the contact Hamiltonian
$f:\Sigma \to \operatorname {\mathbb {R}}^+$ such that the contact Hamiltonian  $h+f$ has no 1-periodic orbits.
$h+f$ has no 1-periodic orbits.
The next proposition implies that  $\Pi (h)$ is non-empty for
$\Pi (h)$ is non-empty for  $h\in \mathcal {H}_\Omega (\Sigma )$. It is also used in the proof of Lemma 3.5.
$h\in \mathcal {H}_\Omega (\Sigma )$. It is also used in the proof of Lemma 3.5.
Proposition 3.3 Let  $\Sigma$ be a closed contact manifold with a contact form. Let
$\Sigma$ be a closed contact manifold with a contact form. Let  $h:\Sigma \to \operatorname {\mathbb {R}}$ be a contact Hamiltonian such that
$h:\Sigma \to \operatorname {\mathbb {R}}$ be a contact Hamiltonian such that  $h$ has no non-constant 1-periodic orbits, and such that
$h$ has no non-constant 1-periodic orbits, and such that  $dY^h(p)=0$ for all
$dY^h(p)=0$ for all  $p\in \Sigma$ at which the vector field
$p\in \Sigma$ at which the vector field  $Y^h$ vanishes. Then, there exists a
$Y^h$ vanishes. Then, there exists a  $C^2$ neighbourhood of
$C^2$ neighbourhood of  $h$ in
$h$ in  $C^\infty (\Sigma )$ such that the flow of
$C^\infty (\Sigma )$ such that the flow of  $g$ has no non-constant 1-periodic orbits for all
$g$ has no non-constant 1-periodic orbits for all  $g$ in that neighbourhood.
$g$ in that neighbourhood.
Proof. Assume the contrary. Then, there exist a sequence of contact Hamiltonians  $h_k$ and a sequence
$h_k$ and a sequence  $x_k\in \Sigma$ such that
$x_k\in \Sigma$ such that  $h_k\to h$ in
$h_k\to h$ in  $C^2$ topology, such that
$C^2$ topology, such that  $x_k\to x_0,$ and such that
$x_k\to x_0,$ and such that  $t\mapsto \varphi _t^{h_k}(x_k)$ is a non-constant 1-periodic orbit of
$t\mapsto \varphi _t^{h_k}(x_k)$ is a non-constant 1-periodic orbit of  $h_k$. This implies that
$h_k$. This implies that  $t\mapsto \varphi _t^h(x_0)$ is a 1-periodic orbit of
$t\mapsto \varphi _t^h(x_0)$ is a 1-periodic orbit of  $h$ and, therefore, has to be constant. By assumptions,
$h$ and, therefore, has to be constant. By assumptions,  $dY^h(x_0)=0$. The map
$dY^h(x_0)=0$. The map  $C^\infty (\Sigma )\to \mathfrak {X}(\Sigma )$ that assigns the contact vector field to a contact Hamiltonian is continuous with respect to
$C^\infty (\Sigma )\to \mathfrak {X}(\Sigma )$ that assigns the contact vector field to a contact Hamiltonian is continuous with respect to  $C^2$ topology on
$C^2$ topology on  $C^\infty (\Sigma )$ and
$C^\infty (\Sigma )$ and  $C^1$ topology on
$C^1$ topology on  $\mathfrak {X}(\Sigma )$. Consequently (since
$\mathfrak {X}(\Sigma )$. Consequently (since  $h_k\to h$ in
$h_k\to h$ in  $C^2$ topology),
$C^2$ topology),  $Y^{h_k}\to Y^h$ in
$Y^{h_k}\to Y^h$ in  $C^1$ topology. Therefore, for each
$C^1$ topology. Therefore, for each  $L>0,$ there exists a neighbourhood
$L>0,$ there exists a neighbourhood  $U\subset \Sigma$ of
$U\subset \Sigma$ of  $x_0$ and
$x_0$ and  $N\in \mathbb {N}$ such that
$N\in \mathbb {N}$ such that  $Y^{h_k}|_{U}$ is Lipschitz with Lipschitz constant
$Y^{h_k}|_{U}$ is Lipschitz with Lipschitz constant  $L$ for all
$L$ for all  $k\geqslant N$. For
$k\geqslant N$. For  $k$ big enough, the loop
$k$ big enough, the loop  $t\mapsto \varphi _t^{h_k}(x_k)$ is contained in the neighbourhood
$t\mapsto \varphi _t^{h_k}(x_k)$ is contained in the neighbourhood  $U$. This contradicts [Reference YorkeYor69] because for
$U$. This contradicts [Reference YorkeYor69] because for  $L$ small enough there are no non-constant 1-periodic orbits of
$L$ small enough there are no non-constant 1-periodic orbits of  $h_k$ in
$h_k$ in  $U$.
$U$.
The following definition introduces the selective symplectic homology.
Definition 3.4 Let  $W$ be a Liouville domain, and let
$W$ be a Liouville domain, and let  $\Omega \subset \partial W$ be an open subset of the boundary
$\Omega \subset \partial W$ be an open subset of the boundary  $\Sigma :=\partial W$. The selective symplectic homology with respect to
$\Sigma :=\partial W$. The selective symplectic homology with respect to  $\Omega$ is defined as
$\Omega$ is defined as
 \[ SH_\ast^\Omega(W):=\underset{h\in\mathcal{H}_\Omega(\Sigma)}{\lim_{\longrightarrow}}\:\: \underset{f\in\Pi(h)}{\lim_{\longleftarrow}}\: HF_\ast(h+f). \]
\[ SH_\ast^\Omega(W):=\underset{h\in\mathcal{H}_\Omega(\Sigma)}{\lim_{\longrightarrow}}\:\: \underset{f\in\Pi(h)}{\lim_{\longleftarrow}}\: HF_\ast(h+f). \]
The limits are taken with respect to the continuation maps.
Given  $h\in \mathcal {H}_\Omega (\Sigma ),$ Proposition 3.3 implies that for
$h\in \mathcal {H}_\Omega (\Sigma ),$ Proposition 3.3 implies that for  $f:\Sigma \to \operatorname {\mathbb {R}}^+$ smooth and small enough (with respect to the
$f:\Sigma \to \operatorname {\mathbb {R}}^+$ smooth and small enough (with respect to the  $C^2$ topology), the contact Hamiltonian
$C^2$ topology), the contact Hamiltonian  $h+f$ has no 1-periodic orbits. As a consequence, the groups
$h+f$ has no 1-periodic orbits. As a consequence, the groups  $HF_\ast (h+f_1)$ and
$HF_\ast (h+f_1)$ and  $HF_\ast (h+f_2)$ are canonically isomorphic for
$HF_\ast (h+f_2)$ are canonically isomorphic for  $f_1$ and
$f_1$ and  $f_2$ sufficiently small. In other words, the inverse limit
$f_2$ sufficiently small. In other words, the inverse limit
 \[ \underset{f\in\Pi(h)}{\lim_{\longleftarrow}} HF_\ast (h+f) \]
\[ \underset{f\in\Pi(h)}{\lim_{\longleftarrow}} HF_\ast (h+f) \]
stabilizes for  $h\in \mathcal {H}_\Omega (W)$. This is proven in the next lemma.
$h\in \mathcal {H}_\Omega (W)$. This is proven in the next lemma.
Lemma 3.5 Let  $W$ be a Liouville domain, let
$W$ be a Liouville domain, let  $\Omega \subset \partial W$ be an open subset, and let
$\Omega \subset \partial W$ be an open subset, and let  $h\in \mathcal {H}_\Omega (W)$. Then, there exists an open convex neighbourhood
$h\in \mathcal {H}_\Omega (W)$. Then, there exists an open convex neighbourhood  $U$ of 0 (seen as a constant function on
$U$ of 0 (seen as a constant function on  $\partial W$) in
$\partial W$) in  $C^2$ topology such that the natural map
$C^2$ topology such that the natural map
 \[ \underset{f\in\Pi(h)}{\lim_{\longleftarrow}} HF_\ast (h+f) \to HF_\ast(h+g) \]
\[ \underset{f\in\Pi(h)}{\lim_{\longleftarrow}} HF_\ast (h+f) \to HF_\ast(h+g) \]
is an isomorphism for all  $g\in C^\infty (\partial W, \operatorname {\mathbb {R}}^+)\cap U$.
$g\in C^\infty (\partial W, \operatorname {\mathbb {R}}^+)\cap U$.
Proof. Proposition 3.3 implies that there exists a convex  $C^2$ neighbourhood
$C^2$ neighbourhood  $U$ of the constant function
$U$ of the constant function  $\partial W\to \operatorname {\mathbb {R}}: p\mapsto 0$ such that
$\partial W\to \operatorname {\mathbb {R}}: p\mapsto 0$ such that  $h+ f$ has no non-constant 1-periodic orbits if
$h+ f$ has no non-constant 1-periodic orbits if  $f\in U$. Since
$f\in U$. Since  $h+f$ is positive for a positive function
$h+f$ is positive for a positive function  $f\in U$, it does not have any constant orbits either (the corresponding vector field is nowhere 0). Hence,
$f\in U$, it does not have any constant orbits either (the corresponding vector field is nowhere 0). Hence,  $h+f$ has no 1-periodic orbits for all positive functions
$h+f$ has no 1-periodic orbits for all positive functions  $f:\partial W\to \operatorname {\mathbb {R}}^+$ from
$f:\partial W\to \operatorname {\mathbb {R}}^+$ from  $U$. This, in particular, implies
$U$. This, in particular, implies  $\mathcal {O}:=C^\infty (\partial W, \operatorname {\mathbb {R}}^+)\cap U \subset \Pi (h).$ The set
$\mathcal {O}:=C^\infty (\partial W, \operatorname {\mathbb {R}}^+)\cap U \subset \Pi (h).$ The set  $\mathcal {O}$ is also convex. Therefore,
$\mathcal {O}$ is also convex. Therefore,  $(1-s)\cdot f_a + s\cdot f_b\in \mathcal {O}$ for all
$(1-s)\cdot f_a + s\cdot f_b\in \mathcal {O}$ for all  $f_a, f_b\in \mathcal {O}$ and
$f_a, f_b\in \mathcal {O}$ and  $s\in [0,1]$. If, in addition,
$s\in [0,1]$. If, in addition,  $f_a\leqslant f_b$, then
$f_a\leqslant f_b$, then  $h+ (1-s)\cdot f_a + s\cdot f_b$ is an increasing family (in
$h+ (1-s)\cdot f_a + s\cdot f_b$ is an increasing family (in  $s$-variable) of admissible contact Hamiltonians. Theorem 1.3 from [Reference Uljarević and ZhangUZ22] asserts that the continuation map
$s$-variable) of admissible contact Hamiltonians. Theorem 1.3 from [Reference Uljarević and ZhangUZ22] asserts that the continuation map  $HF_\ast (h+f_a)\to HF_\ast (h+f_b)$ is an isomorphism in this case. This implies the claim of the lemma.
$HF_\ast (h+f_a)\to HF_\ast (h+f_b)$ is an isomorphism in this case. This implies the claim of the lemma.
The set  $U$ from Lemma 3.5 is not unique. For technical reasons, it is useful to choose one specific such set (we will denote it by
$U$ from Lemma 3.5 is not unique. For technical reasons, it is useful to choose one specific such set (we will denote it by  $\mathcal {U}(h)$) for a given contact Hamiltonian
$\mathcal {U}(h)$) for a given contact Hamiltonian  $h\in \mathcal {H}_\Omega (\partial W)$. The construction of
$h\in \mathcal {H}_\Omega (\partial W)$. The construction of  $\mathcal {U}(h)$ follows. Let
$\mathcal {U}(h)$ follows. Let  $\psi _j: V_j\to \partial W$ be charts on
$\psi _j: V_j\to \partial W$ be charts on  $\partial W$ and let
$\partial W$ and let  $K_j\subset \psi (V_j)$ be compact subsets,
$K_j\subset \psi (V_j)$ be compact subsets,  $j\in \{1,\ldots, m\}$, such that
$j\in \{1,\ldots, m\}$, such that  $\bigcup _{j=1}^m K_j=\partial W$. Denote by
$\bigcup _{j=1}^m K_j=\partial W$. Denote by  $\lVert \cdot \rVert _{C^2}$ the norm on
$\lVert \cdot \rVert _{C^2}$ the norm on  $C^\infty (\partial W, \operatorname {\mathbb {R}})$ defined by
$C^\infty (\partial W, \operatorname {\mathbb {R}})$ defined by
 \[ \lVert f \rVert_{C^2}:= \underset{i\in\{0,1,2\}}{\max_{j\in\{1,\ldots, m\}}}\max_{K_j} \lVert D^i(f\circ\psi_j) \rVert. \]
\[ \lVert f \rVert_{C^2}:= \underset{i\in\{0,1,2\}}{\max_{j\in\{1,\ldots, m\}}}\max_{K_j} \lVert D^i(f\circ\psi_j) \rVert. \]
The norm  $\lVert \cdot \rVert _{C^2}$ induces the
$\lVert \cdot \rVert _{C^2}$ induces the  $C^2$ topology on
$C^2$ topology on  $C^\infty (\partial W, \operatorname {\mathbb {R}})$. Denote by
$C^\infty (\partial W, \operatorname {\mathbb {R}})$. Denote by  $\mathcal {B}(\varrho )\subset C^\infty (\partial W, \operatorname {\mathbb {R}})$ the open ball with respect to
$\mathcal {B}(\varrho )\subset C^\infty (\partial W, \operatorname {\mathbb {R}})$ the open ball with respect to  $\lVert \cdot \rVert _{C^2}$ centered at 0 of radius
$\lVert \cdot \rVert _{C^2}$ centered at 0 of radius  $\varrho$. Define
$\varrho$. Define  $\mathcal {U}(h)$ as the union of the balls
$\mathcal {U}(h)$ as the union of the balls  $\mathcal {B}(\varrho )$ that have the following property: the contact Hamiltonian
$\mathcal {B}(\varrho )$ that have the following property: the contact Hamiltonian  $h+f$ has no non-constant 1-periodic orbits for all
$h+f$ has no non-constant 1-periodic orbits for all  $f\in \mathcal {B}(\varrho )$. The set
$f\in \mathcal {B}(\varrho )$. The set  $\mathcal {U}(h)$ is open as the union of open subsets. It is convex as the union of nested convex sets. In addition, it is non-empty by Proposition 3.3. The subset of
$\mathcal {U}(h)$ is open as the union of open subsets. It is convex as the union of nested convex sets. In addition, it is non-empty by Proposition 3.3. The subset of  $\mathcal {U}(h)$ consisting of strictly positive functions is denoted by
$\mathcal {U}(h)$ consisting of strictly positive functions is denoted by  $\mathcal {O}(h)$, i.e.
$\mathcal {O}(h)$, i.e.  $\mathcal {O}(h):= \mathcal {U}(h)\cap C^\infty (\partial W, \operatorname {\mathbb {R}^{+}}).$
$\mathcal {O}(h):= \mathcal {U}(h)\cap C^\infty (\partial W, \operatorname {\mathbb {R}^{+}}).$
4. Behaviour under direct limits
The next theorem claims that the selective symplectic homology behaves well with respect to direct limits.
Theorem 4.1 Let  $(W,\lambda )$ be a Liouville domain, and let
$(W,\lambda )$ be a Liouville domain, and let  $\Omega _1,\Omega _2,\ldots$ be a sequence of open subsets of
$\Omega _1,\Omega _2,\ldots$ be a sequence of open subsets of  $\partial W$ such that
$\partial W$ such that  $\Omega _k\subset \Omega _{k+1}$ for all
$\Omega _k\subset \Omega _{k+1}$ for all  $k\in \mathbb {N}$. Denote
$k\in \mathbb {N}$. Denote  $\Omega :=\bigcup _{k}\Omega _k$. Then, the map
$\Omega :=\bigcup _{k}\Omega _k$. Then, the map
 \[ \mathfrak{P} : \lim_{k\to +\infty} SH_\ast^{\Omega_k}(W)\to SH_\ast^\Omega(W), \]
\[ \mathfrak{P} : \lim_{k\to +\infty} SH_\ast^{\Omega_k}(W)\to SH_\ast^\Omega(W), \]
furnished by continuation maps, is an isomorphism.
Proof. Let  $h$ be an arbitrary contact Hamiltonian in
$h$ be an arbitrary contact Hamiltonian in  $\mathcal {H}_\Omega (\partial W)$. Since
$\mathcal {H}_\Omega (\partial W)$. Since  $\operatorname {supp} h$ is a compact subset of
$\operatorname {supp} h$ is a compact subset of  $\Omega$, and since
$\Omega$, and since  $\bigcup \Omega _k=\Omega$, there exists
$\bigcup \Omega _k=\Omega$, there exists  $k\in \mathbb {N}$ such that
$k\in \mathbb {N}$ such that  $\operatorname {supp} h\subset \Omega _k$. For such a
$\operatorname {supp} h\subset \Omega _k$. For such a  $k$, we have
$k$, we have  $h\in \mathcal {H}_{\Omega _k}(\partial W)$. In other words,
$h\in \mathcal {H}_{\Omega _k}(\partial W)$. In other words,  $\bigcup _k \mathcal {H}_{\Omega _k}(\partial W)= \mathcal {H}_\Omega (\partial W)$. The theorem now follows from the next abstract lemma.
$\bigcup _k \mathcal {H}_{\Omega _k}(\partial W)= \mathcal {H}_\Omega (\partial W)$. The theorem now follows from the next abstract lemma.
The following lemma was used in the proof of Theorem 4.1.
Lemma 4.2 Let  $(P,\leqslant )$ be a directed set and let
$(P,\leqslant )$ be a directed set and let  $P_1\subset P_2\subset \cdots \subset P$ be subsets of
$P_1\subset P_2\subset \cdots \subset P$ be subsets of  $P$ such that
$P$ such that  $(P_j,\leqslant )$ is a directed set for all
$(P_j,\leqslant )$ is a directed set for all  $j\in \mathbb {N}$, and such that
$j\in \mathbb {N}$, and such that  $\bigcup _j P_j= P$. Let
$\bigcup _j P_j= P$. Let  $\{G_a\}_{a\in P}$ be a directed system over
$\{G_a\}_{a\in P}$ be a directed system over  $P$. Then, there exists a canonical isomorphism
$P$. Then, there exists a canonical isomorphism
 \[ \underset{j}{\lim_{\longrightarrow}}\:\underset{a\in P_j}{\lim_{\longrightarrow}}\: G_a\:\to\: \underset{a\in P}{\lim_{\longrightarrow}}\: G_a. \]
\[ \underset{j}{\lim_{\longrightarrow}}\:\underset{a\in P_j}{\lim_{\longrightarrow}}\: G_a\:\to\: \underset{a\in P}{\lim_{\longrightarrow}}\: G_a. \]
Proof. Denote by  $f_a^b:G_a\to G_b$,
$f_a^b:G_a\to G_b$,  $a\leqslant b$ the morphisms of the directed system
$a\leqslant b$ the morphisms of the directed system  $\{G_a\}$. Denote by
$\{G_a\}$. Denote by
 \[ \phi_a^j: G_a\to\underset{b\in P_j}{\lim_{\longrightarrow}} G_b \]
\[ \phi_a^j: G_a\to\underset{b\in P_j}{\lim_{\longrightarrow}} G_b \]
the canonical map, defined if  $a\in P_j$. Since
$a\in P_j$. Since  $\phi _b^j\circ f_a^b=\phi _a^j$ whenever
$\phi _b^j\circ f_a^b=\phi _a^j$ whenever  $a\leqslant b$ and
$a\leqslant b$ and  $a,b\in P_j$, the morphisms
$a,b\in P_j$, the morphisms  $\{\phi _a^j\}_{a\in P_i}$ induce a morphism
$\{\phi _a^j\}_{a\in P_i}$ induce a morphism
 \[ F_i^j: \underset{a\in P_i}{\lim_{\longrightarrow}} G_a \to \underset{a\in P_j}{\lim_{\longrightarrow}} G_a \]
\[ F_i^j: \underset{a\in P_i}{\lim_{\longrightarrow}} G_a \to \underset{a\in P_j}{\lim_{\longrightarrow}} G_a \]
for positive integers  $i\leqslant j$. The morphisms
$i\leqslant j$. The morphisms  $\{F_i^j\}_{i\leqslant j}$ make
$\{F_i^j\}_{i\leqslant j}$ make  $\bigl \{\lim _{\mathop {\longrightarrow }\limits _{a\in P_j}} G_a\bigr \}_{j\in \mathbb {N}}$ into a directed system indexed by
$\bigl \{\lim _{\mathop {\longrightarrow }\limits _{a\in P_j}} G_a\bigr \}_{j\in \mathbb {N}}$ into a directed system indexed by  $(\mathbb {N}, \leqslant )$. Denote by
$(\mathbb {N}, \leqslant )$. Denote by
 \begin{align*} \Phi_j: \underset{a\in P_j}{\lim_{\longrightarrow}} G_a \to \underset{j\in \mathbb{N}}{\lim_{\longrightarrow}}\: \underset{a\in P_j}{\lim_{\longrightarrow}} G_a \end{align*}
\begin{align*} \Phi_j: \underset{a\in P_j}{\lim_{\longrightarrow}} G_a \to \underset{j\in \mathbb{N}}{\lim_{\longrightarrow}}\: \underset{a\in P_j}{\lim_{\longrightarrow}} G_a \end{align*}
the canonical map.
We will prove the lemma by showing that  $\lim _{\mathop {\longrightarrow }\limits _{j\in \mathbb {N}}} \lim _{\mathop {\longrightarrow }\limits _{a\in P_j}} G_a$ together with the maps
$\lim _{\mathop {\longrightarrow }\limits _{j\in \mathbb {N}}} \lim _{\mathop {\longrightarrow }\limits _{a\in P_j}} G_a$ together with the maps  $\Phi _j\circ \phi _a^j$,
$\Phi _j\circ \phi _a^j$,  $a\in P$ satisfies the universal property of the direct limit. Let
$a\in P$ satisfies the universal property of the direct limit. Let  $(Y, \{\psi _a\}_{a\in P})$ be a target, i.e.
$(Y, \{\psi _a\}_{a\in P})$ be a target, i.e.  $\{\psi _a: G_a\to Y\}_a$ is a collection of morphisms that satisfy
$\{\psi _a: G_a\to Y\}_a$ is a collection of morphisms that satisfy  $\psi _b\circ f_a^b=\psi _a$ for all
$\psi _b\circ f_a^b=\psi _a$ for all  $a,b\in P$ such that
$a,b\in P$ such that  $a\leqslant b$. Since
$a\leqslant b$. Since  $(Y, \{\psi _a\}_{a\in P_j})$ is a target for the directed system
$(Y, \{\psi _a\}_{a\in P_j})$ is a target for the directed system  $\{G_a\}_{a\in P_j}$, the universal property of the direct limit implies that there exists a unique morphism
$\{G_a\}_{a\in P_j}$, the universal property of the direct limit implies that there exists a unique morphism
 \[ \Psi_j: \underset{a\in P_j}{\lim_{\longrightarrow}} G_a\to Y \]
\[ \Psi_j: \underset{a\in P_j}{\lim_{\longrightarrow}} G_a\to Y \]
such that  $\Psi _j\circ \phi _a^j= \psi _a$ for all positive integers
$\Psi _j\circ \phi _a^j= \psi _a$ for all positive integers  $i\leqslant j$. By applying the universal property again, we conclude that there exists a unique morphism
$i\leqslant j$. By applying the universal property again, we conclude that there exists a unique morphism
 \[ \Psi : \underset{j}{\lim_{\longrightarrow}}\:\underset{a\in P_j}{\lim_{\longrightarrow}}\: G_a\to Y \]
\[ \Psi : \underset{j}{\lim_{\longrightarrow}}\:\underset{a\in P_j}{\lim_{\longrightarrow}}\: G_a\to Y \]
such that  $\Psi \circ \Phi _j=\Psi _j$. Since
$\Psi \circ \Phi _j=\Psi _j$. Since
 \[ \Psi\circ\Phi_j\circ\phi_a^j= \Psi_j\circ \phi_a^j=\psi_a, \]
\[ \Psi\circ\Phi_j\circ\phi_a^j= \Psi_j\circ \phi_a^j=\psi_a, \]
this finishes the proof.
5. Conjugation isomorphisms
Let  $(M,\lambda )$ be a Liouville domain of finite type. The group of symplectomorphisms
$(M,\lambda )$ be a Liouville domain of finite type. The group of symplectomorphisms  $\psi :M\to M$ that preserve the Liouville form outside of a compact subset is denoted by
$\psi :M\to M$ that preserve the Liouville form outside of a compact subset is denoted by  $\operatorname {Symp}^\ast (M,\lambda )$. If
$\operatorname {Symp}^\ast (M,\lambda )$. If  $M=\widehat {W}$ is the completion of a Liouville domain
$M=\widehat {W}$ is the completion of a Liouville domain  $(W, \lambda )$, then for
$(W, \lambda )$, then for  $\psi \in \operatorname {Symp}^\ast (M, \lambda )$ there exist a contactomorphism
$\psi \in \operatorname {Symp}^\ast (M, \lambda )$ there exist a contactomorphism  $\varphi :\partial W \to \partial W$ and a positive smooth function
$\varphi :\partial W \to \partial W$ and a positive smooth function  $f:\partial W\to \operatorname {\mathbb {R}}^+$ such that
$f:\partial W\to \operatorname {\mathbb {R}}^+$ such that
 \[ \psi(x,r)= (\varphi(x), r\cdot f(x)), \]
\[ \psi(x,r)= (\varphi(x), r\cdot f(x)), \]
for  $x\in \partial W$ and
$x\in \partial W$ and  $r\in \operatorname {\mathbb {R}}^+$ large enough. The contactomorphism
$r\in \operatorname {\mathbb {R}}^+$ large enough. The contactomorphism  $\varphi$ is called the ideal restriction of
$\varphi$ is called the ideal restriction of  $\psi$. To an element
$\psi$. To an element  $\psi \in \operatorname {Symp}^\ast (M, \lambda )$, one can associate isomorphisms, called conjugation isomorphisms,
$\psi \in \operatorname {Symp}^\ast (M, \lambda )$, one can associate isomorphisms, called conjugation isomorphisms,
 \[ \mathcal{C}(\psi) : HF_\ast(H,J) \to HF_\ast(\psi^\ast H, \psi^\ast J), \]
\[ \mathcal{C}(\psi) : HF_\ast(H,J) \to HF_\ast(\psi^\ast H, \psi^\ast J), \]
where  $(H,J)$ is regular Floer data. The isomorphisms
$(H,J)$ is regular Floer data. The isomorphisms  $\mathcal {C}(\psi )$ are defined on the generators by
$\mathcal {C}(\psi )$ are defined on the generators by
 \[ \gamma\mapsto \psi^\ast \gamma =\psi^{-1}\circ \gamma. \]
\[ \gamma\mapsto \psi^\ast \gamma =\psi^{-1}\circ \gamma. \]
They are isomorphisms already on the chain level, and already on the chain level, they commute with the continuation maps.
Proposition 5.1 Let  $(M,\lambda )$ be the completion of a Liouville domain
$(M,\lambda )$ be the completion of a Liouville domain  $(W, \lambda )$, let
$(W, \lambda )$, let  $\psi \in \operatorname {Symp}^\ast (M,\lambda )$, and let
$\psi \in \operatorname {Symp}^\ast (M,\lambda )$, and let  $\varphi :\partial W\to \partial W$ be the ideal restriction of
$\varphi :\partial W\to \partial W$ be the ideal restriction of  $\psi$. Then, the conjugation isomorphisms with respect to
$\psi$. Then, the conjugation isomorphisms with respect to  $\psi$ give rise to isomorphisms (called the same)
$\psi$ give rise to isomorphisms (called the same)
 \[ \mathcal{C}(\psi) : SH_\ast^{\Omega}(W)\to SH_\ast^{\varphi^{-1}(\Omega)}(W), \]
\[ \mathcal{C}(\psi) : SH_\ast^{\Omega}(W)\to SH_\ast^{\varphi^{-1}(\Omega)}(W), \]
for every open subset  $\Omega \subset \partial W$.
$\Omega \subset \partial W$.
Proof. Let  $h\in \mathcal {H}_\Omega (\partial W)$, let
$h\in \mathcal {H}_\Omega (\partial W)$, let  $f\in \Pi (h)$, and let
$f\in \Pi (h)$, and let  $(H,J)$ be Floer data for
$(H,J)$ be Floer data for  $W$ and for the contact Hamiltonian
$W$ and for the contact Hamiltonian  $h+f$. The Floer data
$h+f$. The Floer data  $(\psi ^\ast H, \psi ^\ast J)$ corresponds to the contact Hamiltonian
$(\psi ^\ast H, \psi ^\ast J)$ corresponds to the contact Hamiltonian  $g\cdot (h+f)\circ \varphi$, where
$g\cdot (h+f)\circ \varphi$, where  $g:\partial W\to \operatorname {\mathbb {R}}^+$ is a certain positive smooth function. Moreover,
$g:\partial W\to \operatorname {\mathbb {R}}^+$ is a certain positive smooth function. Moreover,  $g\cdot h\circ \varphi \in \mathcal {H}_{\varphi ^{-1}(\Omega )}(W)$ and
$g\cdot h\circ \varphi \in \mathcal {H}_{\varphi ^{-1}(\Omega )}(W)$ and  $g\cdot f\circ \varphi \in \Pi (g\cdot h\circ \varphi ).$ Since the conjugation isomorphisms commute with the continuation maps and since the relations above hold, the conjugation isomorphisms give rise to an isomorphism
$g\cdot f\circ \varphi \in \Pi (g\cdot h\circ \varphi ).$ Since the conjugation isomorphisms commute with the continuation maps and since the relations above hold, the conjugation isomorphisms give rise to an isomorphism
 \[ \mathcal{C}(\psi) : SH_\ast^{\Omega}(W) \to SH_\ast^{\varphi^{-1}(\Omega)}(W). \]
\[ \mathcal{C}(\psi) : SH_\ast^{\Omega}(W) \to SH_\ast^{\varphi^{-1}(\Omega)}(W). \]
Now, the proof of Theorem 1.7 from the introduction follows directly.
Theorem 1.7 Let  $W$ be a Liouville domain, let
$W$ be a Liouville domain, let  $\psi :\widehat {W}\to \widehat {W}$ be a symplectomorphism that preserves the Liouville form outside of a compact set, and let
$\psi :\widehat {W}\to \widehat {W}$ be a symplectomorphism that preserves the Liouville form outside of a compact set, and let  $\varphi :\partial W\to \partial W$ be the ideal restriction of
$\varphi :\partial W\to \partial W$ be the ideal restriction of  $\psi$. Let
$\psi$. Let  $\Omega _a\subset \Omega _b\subset \partial W$ be open subsets. Then, the following diagram, consisting of conjugation isomorphisms and continuation maps, commutes.
$\Omega _a\subset \Omega _b\subset \partial W$ be open subsets. Then, the following diagram, consisting of conjugation isomorphisms and continuation maps, commutes.
Proof. The proof follows directly from the commutativity of the conjugation isomorphisms and the continuation maps on the level of  $HF_\ast (H,J)$.
$HF_\ast (H,J)$.
6. Selective symplectic homology for a Darboux chart
This section proves that sufficiently small open subsets on the boundary of a Liouville domain have finite-dimensional selective symplectic homology. Let  $a_1, \ldots, a_n, b\in \operatorname {\mathbb {R}}^+$. The contact polydisc
$a_1, \ldots, a_n, b\in \operatorname {\mathbb {R}}^+$. The contact polydisc  $P=P(a_1,\ldots, a_n, b)$ is a subset of the standard contact
$P=P(a_1,\ldots, a_n, b)$ is a subset of the standard contact  $\operatorname {\mathbb {R}}^{2n+1}$ (endowed with the contact form
$\operatorname {\mathbb {R}}^{2n+1}$ (endowed with the contact form  $dz + \sum _{j=1}^n(x_jdy_j -y_jdx_j)$) that is given by
$dz + \sum _{j=1}^n(x_jdy_j -y_jdx_j)$) that is given by
 \[ P:= \{ (x,y,z)\in\operatorname{\mathbb{R}}^n\times\operatorname{\mathbb{R}}^n\times\operatorname{\mathbb{R}}\,|\, z^2\leqslant b^2\text{ and } (\forall j\in\{1,\ldots, n\})\ x_j^2+y_j^2\leqslant a_j^2\}. \]
\[ P:= \{ (x,y,z)\in\operatorname{\mathbb{R}}^n\times\operatorname{\mathbb{R}}^n\times\operatorname{\mathbb{R}}\,|\, z^2\leqslant b^2\text{ and } (\forall j\in\{1,\ldots, n\})\ x_j^2+y_j^2\leqslant a_j^2\}. \]
Theorem 6.1 Let  $W$ be a Liouville domain and let
$W$ be a Liouville domain and let  $P\subset \partial W$ be a contact polydisc in a Darboux chart. Then, the continuation map
$P\subset \partial W$ be a contact polydisc in a Darboux chart. Then, the continuation map
 \begin{align*} SH_\ast^{\varnothing}(W)\to SH_\ast^{\operatorname{int}P}(W) \end{align*}
\begin{align*} SH_\ast^{\varnothing}(W)\to SH_\ast^{\operatorname{int}P}(W) \end{align*}
is an isomorphism.
The next lemma is used in the proof of Theorem 6.1.
Lemma 6.2 Let  $\alpha := dz + \sum _{j=1}^n (x_j dy_j - y_j dx_j)$ be the standard contact form on
$\alpha := dz + \sum _{j=1}^n (x_j dy_j - y_j dx_j)$ be the standard contact form on  $\operatorname {\mathbb {R}}^{2n+1}$. Denote by
$\operatorname {\mathbb {R}}^{2n+1}$. Denote by  $(r_j, \theta _j)$ polar coordinates in the
$(r_j, \theta _j)$ polar coordinates in the  $(x_j, y_j)$-plane,
$(x_j, y_j)$-plane,  $j=1,\ldots, n$. Let
$j=1,\ldots, n$. Let  $h:\operatorname {\mathbb {R}}^{2n+1}\to [0,+\infty )$ be a contact Hamiltonian of the form
$h:\operatorname {\mathbb {R}}^{2n+1}\to [0,+\infty )$ be a contact Hamiltonian of the form
 \[ h(r, \theta, z):= \varepsilon + g(z)\cdot \prod_{j=1}^n f_j(r_j), \]
\[ h(r, \theta, z):= \varepsilon + g(z)\cdot \prod_{j=1}^n f_j(r_j), \]
where  $\varepsilon \in \operatorname {\mathbb {R}}^+$,
$\varepsilon \in \operatorname {\mathbb {R}}^+$,  $g:\operatorname {\mathbb {R}}\to [0,+\infty )$ is a smooth function, and
$g:\operatorname {\mathbb {R}}\to [0,+\infty )$ is a smooth function, and  $f_j:[0,+\infty )\to [0,+\infty )$ is a (not necessarily strictly) decreasing smooth function,
$f_j:[0,+\infty )\to [0,+\infty )$ is a (not necessarily strictly) decreasing smooth function,  $j=1,\ldots, n$. Then, the
$j=1,\ldots, n$. Then, the  $z$-coordinate strictly decreases along the trajectories of the contact Hamiltonian
$z$-coordinate strictly decreases along the trajectories of the contact Hamiltonian  $h$ (with respect to the contact form
$h$ (with respect to the contact form  $\alpha$).
$\alpha$).
Proof. Let  $Y^h$ be the vector field of the contact Hamiltonian
$Y^h$ be the vector field of the contact Hamiltonian  $h$, i.e. the vector field that satisfies
$h$, i.e. the vector field that satisfies  $\alpha (Y^h)=- h$ and
$\alpha (Y^h)=- h$ and  $d\alpha (Y^h, \cdot )= dh - dh(\partial _z)\cdot \alpha$. Then,
$d\alpha (Y^h, \cdot )= dh - dh(\partial _z)\cdot \alpha$. Then,
 \[ dz(Y^h)= -\varepsilon + g(z)\cdot \bigg( -\prod_{k=1}^n f_k(r_k) +\frac{1}{2}\cdot \sum_{j=1}^n \bigg(r_j\cdot f'_j(r_j)\cdot \prod_{k\not=j} f_k(r_k)\bigg)\bigg). \]
\[ dz(Y^h)= -\varepsilon + g(z)\cdot \bigg( -\prod_{k=1}^n f_k(r_k) +\frac{1}{2}\cdot \sum_{j=1}^n \bigg(r_j\cdot f'_j(r_j)\cdot \prod_{k\not=j} f_k(r_k)\bigg)\bigg). \]
In particular,  $dz(Y^h(p))\leqslant -\varepsilon$ for all
$dz(Y^h(p))\leqslant -\varepsilon$ for all  $p\in \operatorname {\mathbb {R}}^{2n+1}$. Let
$p\in \operatorname {\mathbb {R}}^{2n+1}$. Let  $\gamma :I\to \operatorname {\mathbb {R}}^{2n+1}$ be a trajectory of the contact Hamiltonian
$\gamma :I\to \operatorname {\mathbb {R}}^{2n+1}$ be a trajectory of the contact Hamiltonian  $h$. Then,
$h$. Then,
 \[ \frac{d}{dt}(z(\gamma(t)))= dz(Y^h(\gamma(t)))\leqslant -\varepsilon. \]
\[ \frac{d}{dt}(z(\gamma(t)))= dz(Y^h(\gamma(t)))\leqslant -\varepsilon. \]
Consequently, the function  $t\mapsto z(\gamma (t))$ is strictly decreasing.
$t\mapsto z(\gamma (t))$ is strictly decreasing.
Proof of Theorem 6.1 By assumptions, there exists a Darboux chart  $\psi :O\to \operatorname {\mathbb {R}}^{2n+1}$,
$\psi :O\to \operatorname {\mathbb {R}}^{2n+1}$,  $O\subset \partial W$, such that
$O\subset \partial W$, such that  $\psi (P)= P(a_1, \ldots, a_n, b)$ for some
$\psi (P)= P(a_1, \ldots, a_n, b)$ for some  $a_1,\ldots, a_n, b\in \operatorname {\mathbb {R}}^+$. Since
$a_1,\ldots, a_n, b\in \operatorname {\mathbb {R}}^+$. Since  $P(a_1, \ldots, a_n, b)$ is compact and
$P(a_1, \ldots, a_n, b)$ is compact and  $\psi (O)$ open, there exist
$\psi (O)$ open, there exist  $b', a_1',\ldots, a_n'\in \operatorname {\mathbb {R}}^+$ such that
$b', a_1',\ldots, a_n'\in \operatorname {\mathbb {R}}^+$ such that
 \[ P(a_1, \ldots, a_n, b)\subset \operatorname{int} P(a_1', \ldots, a_n', b')\subset \psi(O). \]
\[ P(a_1, \ldots, a_n, b)\subset \operatorname{int} P(a_1', \ldots, a_n', b')\subset \psi(O). \]
In particular,  $b< b'$. Denote
$b< b'$. Denote  $\varepsilon _1 := b'-b$
$\varepsilon _1 := b'-b$
Let  $h\in \mathcal {H}_{\operatorname {int} P}(\partial W)$ be such that
$h\in \mathcal {H}_{\operatorname {int} P}(\partial W)$ be such that
 \begin{equation} h\circ \psi^{-1} (r, \theta, z) = g(z)\cdot \prod_{j=1}^n f_j(r_j) \end{equation}
\begin{equation} h\circ \psi^{-1} (r, \theta, z) = g(z)\cdot \prod_{j=1}^n f_j(r_j) \end{equation}
for some smooth function  $g:\operatorname {\mathbb {R}}\to [0,+\infty )$ and some smooth decreasing functions
$g:\operatorname {\mathbb {R}}\to [0,+\infty )$ and some smooth decreasing functions  $f_j:[0,+\infty )\to [0, +\infty )$,
$f_j:[0,+\infty )\to [0, +\infty )$,  $j=1, \ldots, n$ such that
$j=1, \ldots, n$ such that  $\operatorname {supp} g \subset (0, b)$ and
$\operatorname {supp} g \subset (0, b)$ and  $\operatorname {supp} f_j\subset (0, a_j)$. Let
$\operatorname {supp} f_j\subset (0, a_j)$. Let  $\varepsilon _0\in \operatorname {\mathbb {R}}^+$ be such that there are no closed Reeb orbits on
$\varepsilon _0\in \operatorname {\mathbb {R}}^+$ be such that there are no closed Reeb orbits on  $\partial W$ of period less than or equal to
$\partial W$ of period less than or equal to  $\varepsilon _0$.
$\varepsilon _0$.
Now, we show that the contact Hamiltonian  $h+\varepsilon$ has no 1-periodic orbits if
$h+\varepsilon$ has no 1-periodic orbits if  $0<\varepsilon <\min \{\varepsilon _0, \varepsilon _1\}$. This implies
$0<\varepsilon <\min \{\varepsilon _0, \varepsilon _1\}$. This implies  $\varepsilon \in \mathcal {O}(h)$ if
$\varepsilon \in \mathcal {O}(h)$ if  $0<\varepsilon <\min \{\varepsilon _0, \varepsilon _1\}$. Let
$0<\varepsilon <\min \{\varepsilon _0, \varepsilon _1\}$. Let  $\gamma :\operatorname {\mathbb {R}}\to \partial W$ be a trajectory of the contact Hamiltonian
$\gamma :\operatorname {\mathbb {R}}\to \partial W$ be a trajectory of the contact Hamiltonian  $h+\varepsilon$. If
$h+\varepsilon$. If  $\gamma$ does not intersect
$\gamma$ does not intersect  $P$, then
$P$, then  $\gamma$ is also a trajectory of the reparametrized Reeb flow
$\gamma$ is also a trajectory of the reparametrized Reeb flow  $t\mapsto \varphi _{-\varepsilon \cdot t}$. Since
$t\mapsto \varphi _{-\varepsilon \cdot t}$. Since  $\varepsilon <\varepsilon _0$, this implies that
$\varepsilon <\varepsilon _0$, this implies that  $\gamma$ is not 1-periodic. Assume, now, that
$\gamma$ is not 1-periodic. Assume, now, that  $\gamma$ does intersect
$\gamma$ does intersect  $P$. If
$P$. If  $\gamma$ is entirely contained in
$\gamma$ is entirely contained in  $O$, then Lemma 6.2 implies that
$O$, then Lemma 6.2 implies that  $\gamma$ is not 1-periodic. If
$\gamma$ is not 1-periodic. If  $\gamma$ is not entirely contained in
$\gamma$ is not entirely contained in  $O$, then (by Lemma 6.2)
$O$, then (by Lemma 6.2)  $\gamma$ intersects
$\gamma$ intersects  $\psi ^{-1}(\operatorname {\mathbb {R}}^{2n}\times [b, b'])$. On
$\psi ^{-1}(\operatorname {\mathbb {R}}^{2n}\times [b, b'])$. On  $\psi ^{-1}(\operatorname {\mathbb {R}}^{2n}\times [b, b'])$, the contact Hamiltonian
$\psi ^{-1}(\operatorname {\mathbb {R}}^{2n}\times [b, b'])$, the contact Hamiltonian  $h+\varepsilon$ is equal to
$h+\varepsilon$ is equal to  $\varepsilon$ and
$\varepsilon$ and  $\gamma (t)$ is equal to
$\gamma (t)$ is equal to  $\psi ^{-1}(x,y, z-\varepsilon t)$ for some
$\psi ^{-1}(x,y, z-\varepsilon t)$ for some  $(x,y,z)\in \operatorname {\mathbb {R}}^{2n+1}$. In particular,
$(x,y,z)\in \operatorname {\mathbb {R}}^{2n+1}$. In particular,  $\gamma$ ‘spends’ at least
$\gamma$ ‘spends’ at least  $ ({b'-b})/{\varepsilon }$ time passing through
$ ({b'-b})/{\varepsilon }$ time passing through  $\psi ^{-1}(\operatorname {\mathbb {R}}^{2n}\times [b, b'])$. Since
$\psi ^{-1}(\operatorname {\mathbb {R}}^{2n}\times [b, b'])$. Since
 \[ \frac{b'-b}{\varepsilon}> \frac{b'-b}{\varepsilon_1}=1, \]
\[ \frac{b'-b}{\varepsilon}> \frac{b'-b}{\varepsilon_1}=1, \]
 $\gamma$ cannot be 1-periodic.
$\gamma$ cannot be 1-periodic.
The same argument shows that the contact Hamiltonian  $h^s:= s\cdot h+ \varepsilon$ has no 1-periodic orbits for all
$h^s:= s\cdot h+ \varepsilon$ has no 1-periodic orbits for all  $s\in [0,1]$. In addition,
$s\in [0,1]$. In addition,  $\partial _sh^s\geqslant 0$. Therefore, the continuation map
$\partial _sh^s\geqslant 0$. Therefore, the continuation map
 \[ HF_\ast(\varepsilon)=HF_\ast(h^0)\to HF_\ast(h^1)= HF_\ast(h+\varepsilon) \]
\[ HF_\ast(\varepsilon)=HF_\ast(h^0)\to HF_\ast(h^1)= HF_\ast(h+\varepsilon) \]
is an isomorphism [Reference Uljarević and ZhangUZ22, Theorem 1.3]. Since for every  $\tilde {h}\in \mathcal {H}_{\operatorname {int} P}(\partial W)$ there exists
$\tilde {h}\in \mathcal {H}_{\operatorname {int} P}(\partial W)$ there exists  $h\in \mathcal {H}_{\operatorname {int} P}(\partial W)$ of the form (6.1) such that
$h\in \mathcal {H}_{\operatorname {int} P}(\partial W)$ of the form (6.1) such that  $\tilde {h}\leqslant h$, the theorem follows.
$\tilde {h}\leqslant h$, the theorem follows.
7. Immaterial transverse circles and selective symplectic homology of their complements
This section provides non-trivial examples where the selective symplectic homology is ‘large’. We start by defining immaterial subsets of contact manifolds.
Definition 7.1 A subset  $A$ of a contact manifold
$A$ of a contact manifold  $\Sigma$ is called immaterial if there exists a contractible loop
$\Sigma$ is called immaterial if there exists a contractible loop  $\varphi _t:\Sigma \to \Sigma$ of contactomorphisms such that its contact Hamiltonian
$\varphi _t:\Sigma \to \Sigma$ of contactomorphisms such that its contact Hamiltonian  $h_t:\Sigma \to \operatorname {\mathbb {R}}$ (with respect to some contact form on
$h_t:\Sigma \to \operatorname {\mathbb {R}}$ (with respect to some contact form on  $\Sigma$) is positive on
$\Sigma$) is positive on  $A$, i.e. such that it satisfies
$A$, i.e. such that it satisfies
 \[ (\forall x\in A)(\forall t\in\operatorname{\mathbb{R}})\quad h_t(x)>0. \]
\[ (\forall x\in A)(\forall t\in\operatorname{\mathbb{R}})\quad h_t(x)>0. \]
If a compact subset  $A$ of a contact manifold
$A$ of a contact manifold  $\Sigma$ is immaterial, then there exists a contractible loop of contactomorphisms on
$\Sigma$ is immaterial, then there exists a contractible loop of contactomorphisms on  $\Sigma$ whose contact Hamiltonian is arbitrarily large on
$\Sigma$ whose contact Hamiltonian is arbitrarily large on  $A$. In fact, this property of a compact subset
$A$. In fact, this property of a compact subset  $A$ is equivalent to
$A$ is equivalent to  $A$ being immaterial.
$A$ being immaterial.
Lemma 7.2 A compact subset  $A$ of a contact manifold
$A$ of a contact manifold  $\Sigma$ is immaterial if, and only if, for every
$\Sigma$ is immaterial if, and only if, for every  $a\in \operatorname {\mathbb {R}}^+$ there exists a contractible loop of contactomorphisms on
$a\in \operatorname {\mathbb {R}}^+$ there exists a contractible loop of contactomorphisms on  $\Sigma$ such that its contact Hamiltonian
$\Sigma$ such that its contact Hamiltonian  $h_t:\Sigma \to \operatorname {\mathbb {R}}$ satisfies
$h_t:\Sigma \to \operatorname {\mathbb {R}}$ satisfies
 \[ (\forall x\in A)(\forall t\in\operatorname{\mathbb{R}})\quad h_t(x)\geqslant a. \]
\[ (\forall x\in A)(\forall t\in\operatorname{\mathbb{R}})\quad h_t(x)\geqslant a. \]
Proof. Let  $a\in \operatorname {\mathbb {R}}^+$ be an arbitrarily large positive number and let
$a\in \operatorname {\mathbb {R}}^+$ be an arbitrarily large positive number and let  $A$ be a compact immaterial subset of a contact manifold
$A$ be a compact immaterial subset of a contact manifold  $\Sigma$. Then, there exists a contractible loop
$\Sigma$. Then, there exists a contractible loop  $\varphi :\Sigma \to \Sigma$ of contactomorphisms such that its contact Hamiltonian
$\varphi :\Sigma \to \Sigma$ of contactomorphisms such that its contact Hamiltonian  $h_t:\Sigma \to \operatorname {\mathbb {R}}$ satisfies
$h_t:\Sigma \to \operatorname {\mathbb {R}}$ satisfies
 \[ (\forall x\in A)(\forall t\in\operatorname{\mathbb{R}})\quad h_t(x)>0. \]
\[ (\forall x\in A)(\forall t\in\operatorname{\mathbb{R}})\quad h_t(x)>0. \]
Denote  $m:= \min _{x\in A, t\in \operatorname {\mathbb {R}}} h_t(x)>0$. Let
$m:= \min _{x\in A, t\in \operatorname {\mathbb {R}}} h_t(x)>0$. Let  $k\in \mathbb {N}$ be such that
$k\in \mathbb {N}$ be such that  $k\cdot m> a$. Denote by
$k\cdot m> a$. Denote by  $h^k_t:\Sigma \to \operatorname {\mathbb {R}}$ the contact Hamiltonian defined by
$h^k_t:\Sigma \to \operatorname {\mathbb {R}}$ the contact Hamiltonian defined by  $h^k_t(x):=k\cdot h_{kt}(x)$. The contact Hamiltonian
$h^k_t(x):=k\cdot h_{kt}(x)$. The contact Hamiltonian  $h^k$ furnishes a loop of contactomorphisms that is obtained by concatenating
$h^k$ furnishes a loop of contactomorphisms that is obtained by concatenating  $\varphi$ to itself
$\varphi$ to itself  $k$ times. In particular,
$k$ times. In particular,  $h^k$ generates a contractible loop of contactomorphisms. By construction
$h^k$ generates a contractible loop of contactomorphisms. By construction
 \[ (\forall x\in A)(\forall t\in \operatorname{\mathbb{R}})\quad h^k_t(x)\geqslant k\cdot m>a. \]
\[ (\forall x\in A)(\forall t\in \operatorname{\mathbb{R}})\quad h^k_t(x)\geqslant k\cdot m>a. \]
This proves one direction of the lemma. The other direction is obvious.
The next lemma implies that a singleton (i.e. a set consisting of a single point) is immaterial in every contact manifold of dimension greater than 3. By continuity, every point in a contact manifold of dimension greater than 3 has an immaterial neighbourhood.
Lemma 7.3 Let  $\Sigma$ be a contact manifold of dimension
$\Sigma$ be a contact manifold of dimension  $2n+1 > 3$. Then, there exists a contractible loop
$2n+1 > 3$. Then, there exists a contractible loop  $\varphi _t:\Sigma \to \Sigma$ of contactomorphisms such that its contact Hamiltonian is positive at some point (for all times
$\varphi _t:\Sigma \to \Sigma$ of contactomorphisms such that its contact Hamiltonian is positive at some point (for all times  $t$).
$t$).
Proof. Let  $\mathbb {S}^{2n+1}$ be the standard contact sphere seen as the unit sphere in
$\mathbb {S}^{2n+1}$ be the standard contact sphere seen as the unit sphere in  $\mathbb {C}^{n+1}$ centered at the origin. The unitary matrices act on
$\mathbb {C}^{n+1}$ centered at the origin. The unitary matrices act on  $\mathbb {S}^{2n+1}$ as contactomorphisms. Let
$\mathbb {S}^{2n+1}$ as contactomorphisms. Let  $\psi _t:\mathbb {S}^{2n+1}\to \mathbb {S}^{2n+1}$ be the contact circle action given by
$\psi _t:\mathbb {S}^{2n+1}\to \mathbb {S}^{2n+1}$ be the contact circle action given by
 \[ \psi_t(z):= (z_1, \ldots, z_{n-1}, e^{2\pi i t} z_n, e^{-2\pi i t} z_{n+1}). \]
\[ \psi_t(z):= (z_1, \ldots, z_{n-1}, e^{2\pi i t} z_n, e^{-2\pi i t} z_{n+1}). \]
The loop
 \[ t\mapsto \left[\begin{matrix} e^{2\pi i t} & 0\\ 0 & e^{-2\pi i t} \end{matrix}\right] \]
\[ t\mapsto \left[\begin{matrix} e^{2\pi i t} & 0\\ 0 & e^{-2\pi i t} \end{matrix}\right] \]
is contractible in the unitary group  $U(2)$. Hence, there exists a smooth
$U(2)$. Hence, there exists a smooth  $s$-family
$s$-family  $A^s$,
$A^s$,  $s\in [0,1]$, of loops in
$s\in [0,1]$, of loops in  $U(2)$ such that
$U(2)$ such that
 \[ A^1(t)= \left[\begin{matrix} e^{2\pi i t} & 0\\ 0 & e^{-2\pi i t} \end{matrix}\right] \]
\[ A^1(t)= \left[\begin{matrix} e^{2\pi i t} & 0\\ 0 & e^{-2\pi i t} \end{matrix}\right] \]
and such that  $A^0(t)= \big [\begin{smallmatrix}1 & 0\\ 0 & 1\end{smallmatrix}\big ]$ for all
$A^0(t)= \big [\begin{smallmatrix}1 & 0\\ 0 & 1\end{smallmatrix}\big ]$ for all  $t$. Denote
$t$. Denote  $\psi ^s_t(z):=\big [\begin{smallmatrix} {\mathbb 1}_{n-1} & \\ & A^s(t) \end{smallmatrix}\big ] z$. For all
$\psi ^s_t(z):=\big [\begin{smallmatrix} {\mathbb 1}_{n-1} & \\ & A^s(t) \end{smallmatrix}\big ] z$. For all  $s\in [0,1]$,
$s\in [0,1]$,  $\psi ^s$ is a loop of contactomorphisms of
$\psi ^s$ is a loop of contactomorphisms of  $\mathbb {S}^{2n+1}$ and
$\mathbb {S}^{2n+1}$ and  $\psi _t^0=\operatorname {id}$,
$\psi _t^0=\operatorname {id}$,  $\psi _t^1=\psi _t$. Therefore,
$\psi _t^1=\psi _t$. Therefore,  $\psi _t$ is a contractible loop of contactomorphisms. Denote by
$\psi _t$ is a contractible loop of contactomorphisms. Denote by  $h^s_t:\mathbb {S}^{2n+1}\to \mathbb {R}$ the contact Hamiltonian of
$h^s_t:\mathbb {S}^{2n+1}\to \mathbb {R}$ the contact Hamiltonian of  $\psi ^s_t$ and
$\psi ^s_t$ and  $h:=h^1$. Explicitly,
$h:=h^1$. Explicitly,  $h(z_1,\ldots, z_{n+1})= 2\pi \cdot (\lvert z_{n+1} \rvert ^2-\lvert z_n \rvert ^2)$. In particular,
$h(z_1,\ldots, z_{n+1})= 2\pi \cdot (\lvert z_{n+1} \rvert ^2-\lvert z_n \rvert ^2)$. In particular,  $h$ is positive at the point
$h$ is positive at the point  $(0,\ldots, 0,1)$. Denote
$(0,\ldots, 0,1)$. Denote  $V(r):=\{ z\in \mathbb {S}^{2n+1}\,|\, \lvert z_1 \rvert > 1-r\}$ and let
$V(r):=\{ z\in \mathbb {S}^{2n+1}\,|\, \lvert z_1 \rvert > 1-r\}$ and let  $\varepsilon \in (0,1)$. Let
$\varepsilon \in (0,1)$. Let  $\mu : \mathbb {S}^{2n+1}\to [0,1]$ be a smooth cut-off function such that
$\mu : \mathbb {S}^{2n+1}\to [0,1]$ be a smooth cut-off function such that  $\mu (x)=0$ for
$\mu (x)=0$ for  $x$ in a neighbourhood of
$x$ in a neighbourhood of  $p:=(1,0,\ldots, 0)$ and such that
$p:=(1,0,\ldots, 0)$ and such that  $\mu (x)=1$ for
$\mu (x)=1$ for  $x\in \mathbb {S}^{2n+1}\setminus V( {\varepsilon }/{2})$. Let
$x\in \mathbb {S}^{2n+1}\setminus V( {\varepsilon }/{2})$. Let  $f_t^s(x):= \mu (x)\cdot h^s_t(x)$. By the construction of
$f_t^s(x):= \mu (x)\cdot h^s_t(x)$. By the construction of  $\mu$ and since
$\mu$ and since  $V(r)$ is invariant under
$V(r)$ is invariant under  $\psi ^s_t$ for all
$\psi ^s_t$ for all  $r,s$, and
$r,s$, and  $t$, the contactomorphism
$t$, the contactomorphism  $\varphi _1^{f^s}$ is compactly supported in
$\varphi _1^{f^s}$ is compactly supported in  $V(\varepsilon )$ for all
$V(\varepsilon )$ for all  $s$. Let
$s$. Let  $g^s_t:\mathbb {S}^{2n+1}\to \operatorname {\mathbb {R}}$,
$g^s_t:\mathbb {S}^{2n+1}\to \operatorname {\mathbb {R}}$,  $s\in [0,1]$ be the contact Hamiltonian that generates
$s\in [0,1]$ be the contact Hamiltonian that generates  $t\mapsto \varphi _1^{f^{t\cdot s}}$, i.e.
$t\mapsto \varphi _1^{f^{t\cdot s}}$, i.e.  $\varphi _t^{g^s}= \varphi _1^{f^{t\cdot s}}$. Denote
$\varphi _t^{g^s}= \varphi _1^{f^{t\cdot s}}$. Denote  $g:=g^1$.
$g:=g^1$.
The map  $\varphi ^{f^1}_t\circ (\varphi _t^g)^{-1}$ is a loop of contactomorphisms. Its contact Hamiltonian
$\varphi ^{f^1}_t\circ (\varphi _t^g)^{-1}$ is a loop of contactomorphisms. Its contact Hamiltonian  $e_t:\mathbb {S}^{2n+1}\to \operatorname {\mathbb {R}}$ is equal to 0 in a neighbourhood of
$e_t:\mathbb {S}^{2n+1}\to \operatorname {\mathbb {R}}$ is equal to 0 in a neighbourhood of  $p$ and coincides with
$p$ and coincides with  $f^1$ in
$f^1$ in  $\mathbb {S}^{2n+1}\setminus V(\varepsilon )$. Consequently (since
$\mathbb {S}^{2n+1}\setminus V(\varepsilon )$. Consequently (since  $f^1$ and
$f^1$ and  $h$ coincide in
$h$ coincide in  $\mathbb {S}^{2n+1}\setminus V(\varepsilon )$), the contact Hamiltonians
$\mathbb {S}^{2n+1}\setminus V(\varepsilon )$), the contact Hamiltonians  $e$ and
$e$ and  $h$ coincide in
$h$ coincide in  $\mathbb {S}^{2n+1}\setminus V(\varepsilon )$. This implies that
$\mathbb {S}^{2n+1}\setminus V(\varepsilon )$. This implies that  $\varphi ^{f^1}_t\circ (\varphi _t^g)^{-1}$ is a loop of contactomorphisms of
$\varphi ^{f^1}_t\circ (\varphi _t^g)^{-1}$ is a loop of contactomorphisms of  $\mathbb {S}^{2n+1}$ that are compactly supported in the complement of a neighbourhood of
$\mathbb {S}^{2n+1}$ that are compactly supported in the complement of a neighbourhood of  $p$. In addition, this implies that there exists
$p$. In addition, this implies that there exists  $q\in \mathbb {S}^{2n+1}\setminus V(\varepsilon )$ such that
$q\in \mathbb {S}^{2n+1}\setminus V(\varepsilon )$ such that  $e_t(q)=h(q)>0$ for all
$e_t(q)=h(q)>0$ for all  $t$. The loop
$t$. The loop  $\varphi _t^e=\varphi ^{f^1}_t\circ (\varphi _t^g)^{-1}$ is contractible via the homotopy
$\varphi _t^e=\varphi ^{f^1}_t\circ (\varphi _t^g)^{-1}$ is contractible via the homotopy  $\{\varphi ^{f^s}_t\circ (\varphi _t^{g^s})^{-1}\}_{s\in [0,1]}$ that is also compactly supported in the complement of a neighbourhood of
$\{\varphi ^{f^s}_t\circ (\varphi _t^{g^s})^{-1}\}_{s\in [0,1]}$ that is also compactly supported in the complement of a neighbourhood of  $p$. Since
$p$. Since  $\mathbb {S}^{2n+1}\setminus \{p\}$ is contactomorphic to the standard
$\mathbb {S}^{2n+1}\setminus \{p\}$ is contactomorphic to the standard  $\operatorname {\mathbb {R}}^{2n+1}$ and since every contact manifold has a contact Darboux chart around each of its points, the lemma follows.
$\operatorname {\mathbb {R}}^{2n+1}$ and since every contact manifold has a contact Darboux chart around each of its points, the lemma follows.
The following theorem implies that the complement of an immaterial circle has infinite-dimensional selective symplectic homology under some additional assumptions.
Theorem 7.4 Let  $W$ be a Liouville domain and let
$W$ be a Liouville domain and let  $\Gamma \subset \partial W$ be an immaterial embedded circle that is transverse to the contact distribution. Denote
$\Gamma \subset \partial W$ be an immaterial embedded circle that is transverse to the contact distribution. Denote  $\Omega :=\partial W\setminus \Gamma$. Then, the rank of the continuation map
$\Omega :=\partial W\setminus \Gamma$. Then, the rank of the continuation map  $SH_\ast ^\Omega (W)\to SH_\ast (W)$ is equal to
$SH_\ast ^\Omega (W)\to SH_\ast (W)$ is equal to  $\dim SH_\ast (W)$.
$\dim SH_\ast (W)$.
Proof. This proof assumes results of § 9. For an admissible contact Hamiltonian  $h_t:\partial W\to \operatorname {\mathbb {R}}$, denote by
$h_t:\partial W\to \operatorname {\mathbb {R}}$, denote by  $r(h)=r(W, h)$ the rank of the canonical map
$r(h)=r(W, h)$ the rank of the canonical map  $HF_\ast (h)\to SH_\ast (W)$. It is enough to prove that for every admissible
$HF_\ast (h)\to SH_\ast (W)$. It is enough to prove that for every admissible  $\ell \in \operatorname {\mathbb {R}}$ there exists
$\ell \in \operatorname {\mathbb {R}}$ there exists  $h\in \mathcal {H}_\Omega (\partial W)$ and
$h\in \mathcal {H}_\Omega (\partial W)$ and  $\varepsilon \in \mathcal {O}(h)$ such that
$\varepsilon \in \mathcal {O}(h)$ such that  $r(\ell )\leqslant r(h+\varepsilon )$. Denote by
$r(\ell )\leqslant r(h+\varepsilon )$. Denote by  $\alpha$ the contact form on
$\alpha$ the contact form on  $\partial W$ (the restriction of the Liouville form). Without loss of generality (see Theorem 2.5.15 and Example 2.5.16 in [Reference GeigesGei08]), we may assume that there exists an open neighbourhood
$\partial W$ (the restriction of the Liouville form). Without loss of generality (see Theorem 2.5.15 and Example 2.5.16 in [Reference GeigesGei08]), we may assume that there exists an open neighbourhood  $U\subset \partial W$ of
$U\subset \partial W$ of  $\Gamma$ and an embedding
$\Gamma$ and an embedding  $\psi : U\to \mathbb {C}^n\times \mathbb {S}^1$ such that
$\psi : U\to \mathbb {C}^n\times \mathbb {S}^1$ such that  $\psi (\Gamma )= \{0\}\times \mathbb {S}^1$ and such that
$\psi (\Gamma )= \{0\}\times \mathbb {S}^1$ and such that
 \[ \alpha=\psi^\ast\bigg(d\theta + \frac{i}{2}\sum_{j=1}^n (z_j \, d\overline{z}_j-\overline{z}_j \, dz_j)\bigg). \]
\[ \alpha=\psi^\ast\bigg(d\theta + \frac{i}{2}\sum_{j=1}^n (z_j \, d\overline{z}_j-\overline{z}_j \, dz_j)\bigg). \]
Here,  $z=(z_1,\ldots, z_n)\in \mathbb {C}^n$ and
$z=(z_1,\ldots, z_n)\in \mathbb {C}^n$ and  $\theta \in \mathbb {S}^1$. Let
$\theta \in \mathbb {S}^1$. Let  $\ell \in \operatorname {\mathbb {R}}$ be an arbitrary admissible (constant) slope. Since
$\ell \in \operatorname {\mathbb {R}}$ be an arbitrary admissible (constant) slope. Since  $\Gamma$ is immaterial, there exists a contractible loop of contactomorphisms
$\Gamma$ is immaterial, there exists a contractible loop of contactomorphisms  $\varphi ^f_t:\partial W\to \partial W$ (which we see as a 1-periodic
$\varphi ^f_t:\partial W\to \partial W$ (which we see as a 1-periodic  $\operatorname {\mathbb {R}}$-family of contactomorphisms) such that its contact Hamiltonian
$\operatorname {\mathbb {R}}$-family of contactomorphisms) such that its contact Hamiltonian  $f_t:\partial W\to \operatorname {\mathbb {R}}$ satisfies
$f_t:\partial W\to \operatorname {\mathbb {R}}$ satisfies  $\min _{x\in \Gamma, t\in \operatorname {\mathbb {R}}} f_t(x)\geqslant 2\ell$. Denote
$\min _{x\in \Gamma, t\in \operatorname {\mathbb {R}}} f_t(x)\geqslant 2\ell$. Denote  $m:=\min _{x\in \partial W, t\in \operatorname {\mathbb {R}}} f_t(x)$. Let
$m:=\min _{x\in \partial W, t\in \operatorname {\mathbb {R}}} f_t(x)$. Let  $h\in \mathcal {H}_{\Omega }(\partial W)$ be a strict contact Hamiltonian (i.e. its flow preserves the contact form
$h\in \mathcal {H}_{\Omega }(\partial W)$ be a strict contact Hamiltonian (i.e. its flow preserves the contact form  $\alpha$ ) such that
$\alpha$ ) such that  $h(x)\geqslant \ell - m$ for
$h(x)\geqslant \ell - m$ for  $x$ in the set
$x$ in the set  $\{x\in \partial W\,|\, \min _{t\in \operatorname {\mathbb {R}}} f_t(x)\leqslant \ell \}$. The contact Hamiltonian
$\{x\in \partial W\,|\, \min _{t\in \operatorname {\mathbb {R}}} f_t(x)\leqslant \ell \}$. The contact Hamiltonian  $h$ can be constructed as follows. Since the function
$h$ can be constructed as follows. Since the function  $x\mapsto \min _{t\in \operatorname {\mathbb {R}}} f_t(x)$ is continuous, the set
$x\mapsto \min _{t\in \operatorname {\mathbb {R}}} f_t(x)$ is continuous, the set  $S:=\{x\in \partial W\,|\, \min _{t\in \operatorname {\mathbb {R}}} f_t(x)\leqslant \ell \}$ is closed. Therefore, there exists a ball
$S:=\{x\in \partial W\,|\, \min _{t\in \operatorname {\mathbb {R}}} f_t(x)\leqslant \ell \}$ is closed. Therefore, there exists a ball  $B(r)\subset \mathbb {C}^n$ centered at the origin with sufficiently small radius
$B(r)\subset \mathbb {C}^n$ centered at the origin with sufficiently small radius  $r$ such that
$r$ such that  $\overline {B(r)}\times \mathbb {S}^1\subset \psi (\partial W \setminus S)$. Now, we choose
$\overline {B(r)}\times \mathbb {S}^1\subset \psi (\partial W \setminus S)$. Now, we choose  $h$ to be equal to a constant greater than
$h$ to be equal to a constant greater than  $\ell -m$ on
$\ell -m$ on  $\partial W\setminus \psi ^{-1}(\overline {B(r)}\times \mathbb {S}^1)$ and such that
$\partial W\setminus \psi ^{-1}(\overline {B(r)}\times \mathbb {S}^1)$ and such that  $h\circ \psi ^{-1}(z, \theta )= \overline {h}(z_1^2+\cdots + z_n^2)$ for
$h\circ \psi ^{-1}(z, \theta )= \overline {h}(z_1^2+\cdots + z_n^2)$ for  $\lvert z \rvert < r$ and for some smooth function
$\lvert z \rvert < r$ and for some smooth function  $\overline {h}: [0,+\infty )\to [0,+\infty )$ that is equal to 0 near 0. Generically,
$\overline {h}: [0,+\infty )\to [0,+\infty )$ that is equal to 0 near 0. Generically,  $h$ has no non-constant 1-periodic orbits.
$h$ has no non-constant 1-periodic orbits.
Let  $\varepsilon \in \operatorname {\mathbb {R}}^+$ be a sufficiently small positive number such that
$\varepsilon \in \operatorname {\mathbb {R}}^+$ be a sufficiently small positive number such that  $\varepsilon \in \mathcal {O}(h)$ and denote
$\varepsilon \in \mathcal {O}(h)$ and denote  $h^\varepsilon := h+\varepsilon$. Let
$h^\varepsilon := h+\varepsilon$. Let  $g:=h^\varepsilon \# f$ be the contact Hamiltonian that generates the contact isotopy
$g:=h^\varepsilon \# f$ be the contact Hamiltonian that generates the contact isotopy  $\varphi _t^{h^\varepsilon }\circ \varphi _t^f$, i.e.
$\varphi _t^{h^\varepsilon }\circ \varphi _t^f$, i.e.
 \[ g_t(x) := h^{\varepsilon}(x) + f_t\circ (\varphi^{h^\varepsilon}_t)^{-1}(x). \]
\[ g_t(x) := h^{\varepsilon}(x) + f_t\circ (\varphi^{h^\varepsilon}_t)^{-1}(x). \]
(In the last formula, we used that  $h^\varepsilon$ is a strict contact Hamiltonian.) If
$h^\varepsilon$ is a strict contact Hamiltonian.) If  $h^\varepsilon (x) < \ell -m$, then (since
$h^\varepsilon (x) < \ell -m$, then (since  $h^\varepsilon$ is autonomous and strict)
$h^\varepsilon$ is autonomous and strict)  $h^\varepsilon \circ (\varphi _t^{h^\varepsilon })^{-1}(x)<\ell -m$ for all
$h^\varepsilon \circ (\varphi _t^{h^\varepsilon })^{-1}(x)<\ell -m$ for all  $t$. Consequently (by the choice of
$t$. Consequently (by the choice of  $h$),
$h$),  $\min _{s\in \operatorname {\mathbb {R}}} f_s\circ (\varphi _t^{h^\varepsilon })^{-1}(x)> \ell$. This implies
$\min _{s\in \operatorname {\mathbb {R}}} f_s\circ (\varphi _t^{h^\varepsilon })^{-1}(x)> \ell$. This implies  $g_t(x)\geqslant \ell$ for all
$g_t(x)\geqslant \ell$ for all  $x\in \partial W$ and
$x\in \partial W$ and  $t\in \operatorname {\mathbb {R}}$.
$t\in \operatorname {\mathbb {R}}$.
Since  $\varphi ^f$ is a contractible loop of contactomorphisms, there exists a smooth homotopy
$\varphi ^f$ is a contractible loop of contactomorphisms, there exists a smooth homotopy  $\sigma$ from the constant loop
$\sigma$ from the constant loop  $t\mapsto \operatorname {id}$ to
$t\mapsto \operatorname {id}$ to  $\varphi ^f$. By § 9, there exist isomorphisms
$\varphi ^f$. By § 9, there exist isomorphisms  $\mathcal {B}(\varphi ^f,\sigma ) : HF_\ast (h^\varepsilon )\to HF_\ast (h^\varepsilon \# f)$ and
$\mathcal {B}(\varphi ^f,\sigma ) : HF_\ast (h^\varepsilon )\to HF_\ast (h^\varepsilon \# f)$ and  $\mathcal {B}(\varphi ^f,\sigma ) : SH_\ast (W)\to SH_\ast (W)$ such that the following diagram , whose vertical arrows represent the continuation maps, commutes.
$\mathcal {B}(\varphi ^f,\sigma ) : SH_\ast (W)\to SH_\ast (W)$ such that the following diagram , whose vertical arrows represent the continuation maps, commutes.
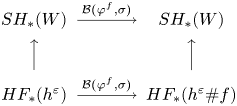
Consequently,  $r(h^\varepsilon )=r(h^\varepsilon \# f)= r(g)$. Since
$r(h^\varepsilon )=r(h^\varepsilon \# f)= r(g)$. Since  $g\geqslant \ell$, we have
$g\geqslant \ell$, we have  $r(g)\geqslant r(\ell )$. This further implies
$r(g)\geqslant r(\ell )$. This further implies  $r(h+\varepsilon )= r(h^\varepsilon )\geqslant r(\ell )$ and the proof is finished.
$r(h+\varepsilon )= r(h^\varepsilon )\geqslant r(\ell )$ and the proof is finished.
8. Applications to contact non-squeezing
We start with a proof of Theorem 1.8 from the introduction.
Theorem 1.8 Let  $W$ be a Liouville domain and let
$W$ be a Liouville domain and let  $\Omega _a, \Omega _b\subset \partial W$ be open subsets. If the rank of the continuation map
$\Omega _a, \Omega _b\subset \partial W$ be open subsets. If the rank of the continuation map  $SH_\ast ^{\Omega _b}(W)\to SH_\ast (W)$ is (strictly) greater than the rank of the continuation map
$SH_\ast ^{\Omega _b}(W)\to SH_\ast (W)$ is (strictly) greater than the rank of the continuation map  $SH_\ast ^{\Omega _a}(W)\to SH_\ast (W),$ then
$SH_\ast ^{\Omega _a}(W)\to SH_\ast (W),$ then  $\Omega _b$ cannot be contactly squeezed into
$\Omega _b$ cannot be contactly squeezed into  $\Omega _a$.
$\Omega _a$.
Proof. Denote by  $r(\Omega )\in \mathbb {N}\cup \{0,\infty \}$ the rank of the continuation map
$r(\Omega )\in \mathbb {N}\cup \{0,\infty \}$ the rank of the continuation map  $SH_\ast ^\Omega (W)\to SH_\ast (W).$ Assume the contrary, i.e. that there exist open subsets
$SH_\ast ^\Omega (W)\to SH_\ast (W).$ Assume the contrary, i.e. that there exist open subsets  $\Omega _a, \Omega _b\subset \partial W$ with
$\Omega _a, \Omega _b\subset \partial W$ with  $r(\Omega _a)< r(\Omega _b)$ and a contact isotopy
$r(\Omega _a)< r(\Omega _b)$ and a contact isotopy  $\varphi _t:\partial W\to \partial W$,
$\varphi _t:\partial W\to \partial W$,  $t\in [0,1]$ such that
$t\in [0,1]$ such that  $\varphi _0=\operatorname {id}$ and such that
$\varphi _0=\operatorname {id}$ and such that  $\varphi _1(\Omega _b)\subset \Omega _a$. By § 1.5 (and § 5),
$\varphi _1(\Omega _b)\subset \Omega _a$. By § 1.5 (and § 5),  $r(\varphi _1(\Omega _b))= r(\Omega _b)$. Since
$r(\varphi _1(\Omega _b))= r(\Omega _b)$. Since  $\varphi _1(\Omega _b)\subset \Omega _a$, the continuation map
$\varphi _1(\Omega _b)\subset \Omega _a$, the continuation map  $SH_\ast ^{\varphi _1(\Omega _b)}(W)\to SH_\ast (W)$ factors through the continuation map
$SH_\ast ^{\varphi _1(\Omega _b)}(W)\to SH_\ast (W)$ factors through the continuation map  $SH_\ast ^{\Omega _a}(W)\to SH_\ast (W)$. Hence,
$SH_\ast ^{\Omega _a}(W)\to SH_\ast (W)$. Hence,  $r(\Omega _b)= r(\varphi _1(\Omega _b))\leqslant r(\Omega _a)$. This contradicts the assumption
$r(\Omega _b)= r(\varphi _1(\Omega _b))\leqslant r(\Omega _a)$. This contradicts the assumption  $r(\Omega _a)< r(\Omega _b)$.
$r(\Omega _a)< r(\Omega _b)$.
Theorem 1.4 Let  $n > 2$ be a natural number and let
$n > 2$ be a natural number and let  $W$ be a
$W$ be a  $2n$-dimensional Liouville domain such that
$2n$-dimensional Liouville domain such that  $\dim SH_\ast (W)> \sum _{j=0}^{2n} \dim H_j(W;\mathbb {Z}_2)$ and such that
$\dim SH_\ast (W)> \sum _{j=0}^{2n} \dim H_j(W;\mathbb {Z}_2)$ and such that  $\partial W$ is a homotopy sphere. Then, there exist two embedded closed balls
$\partial W$ is a homotopy sphere. Then, there exist two embedded closed balls  $B_1, B_2\subset \partial W$ of dimension
$B_1, B_2\subset \partial W$ of dimension  $2n-1$ such that
$2n-1$ such that  $B_1$ cannot be contactly squeezed into
$B_1$ cannot be contactly squeezed into  $B_2$.
$B_2$.
Proof. Denote  $\Sigma :=\partial W$, and denote by
$\Sigma :=\partial W$, and denote by  $r(\Omega )\in \mathbb {N}\cup \{0,\infty \}$ the rank of the continuation map
$r(\Omega )\in \mathbb {N}\cup \{0,\infty \}$ the rank of the continuation map  $SH_\ast ^{\Omega }(W)\to SH_\ast (W)$ for an open subset
$SH_\ast ^{\Omega }(W)\to SH_\ast (W)$ for an open subset  $\Omega \subset \Sigma$.
$\Omega \subset \Sigma$.
Step 1: a subset with a small rank. Since  $SH_\ast ^\varnothing (W)$ is isomorphic to
$SH_\ast ^\varnothing (W)$ is isomorphic to  $H_\ast (W, \partial W; \mathbb {Z}_2)$, Theorem 6.1 implies that there exists a non-empty open subset
$H_\ast (W, \partial W; \mathbb {Z}_2)$, Theorem 6.1 implies that there exists a non-empty open subset  $\Omega \subset \Sigma$ such that
$\Omega \subset \Sigma$ such that  $r(\Omega )\leqslant \sum _{j=1}^{2n} H_j(W,\partial W; \mathbb {Z}_2)= \sum _{j=0}^{2n} H_j(W;\mathbb {Z}_2)$.
$r(\Omega )\leqslant \sum _{j=1}^{2n} H_j(W,\partial W; \mathbb {Z}_2)= \sum _{j=0}^{2n} H_j(W;\mathbb {Z}_2)$.
Step 2: a subset with a large rank. This step proves that for every  $c\in \operatorname {\mathbb {R}}$ with
$c\in \operatorname {\mathbb {R}}$ with  $c\leqslant \dim SH_\ast (W)$, there exists an open non-dense subset
$c\leqslant \dim SH_\ast (W)$, there exists an open non-dense subset  $U\subset \Sigma$ such that
$U\subset \Sigma$ such that  $r(U)\geqslant c$. Assume the contrary, i.e. that there exists
$r(U)\geqslant c$. Assume the contrary, i.e. that there exists  $c\in \operatorname {\mathbb {R}}$ such that
$c\in \operatorname {\mathbb {R}}$ such that  $r(U)< c$ for every open non-dense subset
$r(U)< c$ for every open non-dense subset  $U\subset \Sigma$. By Lemma 7.3, there exists a sufficiently small contact Darboux chart on
$U\subset \Sigma$. By Lemma 7.3, there exists a sufficiently small contact Darboux chart on  $\Sigma$ that is immaterial. Let
$\Sigma$ that is immaterial. Let  $\Gamma$ be an embedded circle in that chart that is transverse to the contact distribution. Then,
$\Gamma$ be an embedded circle in that chart that is transverse to the contact distribution. Then,  $\Gamma$ is immaterial as well. Consequently (by Theorem 7.4), the continuation map
$\Gamma$ is immaterial as well. Consequently (by Theorem 7.4), the continuation map  $\Phi : SH_\ast ^{\Sigma \setminus \Gamma }(W)\to SH_\ast (W)$ has rank equal to
$\Phi : SH_\ast ^{\Sigma \setminus \Gamma }(W)\to SH_\ast (W)$ has rank equal to  $\dim SH_\ast (W)$, i.e.
$\dim SH_\ast (W)$, i.e.  $r(\Sigma \setminus \Gamma )=\dim SH_\ast (W)$. Hence, there exist
$r(\Sigma \setminus \Gamma )=\dim SH_\ast (W)$. Hence, there exist  $a_1, \ldots, a_k\in SH_\ast ^{\Sigma \setminus \Gamma }(W)$, with
$a_1, \ldots, a_k\in SH_\ast ^{\Sigma \setminus \Gamma }(W)$, with  $k\geqslant c$, such that
$k\geqslant c$, such that  $\Phi (a_1), \ldots, \Phi (a_k)$ are linearly independent. Let
$\Phi (a_1), \ldots, \Phi (a_k)$ are linearly independent. Let  $U_1, U_2, \ldots$ be an increasing family of open non-dense subsets of
$U_1, U_2, \ldots$ be an increasing family of open non-dense subsets of  $\Sigma$ such that
$\Sigma$ such that  $\bigcup _{j=1}^\infty U_j=\Sigma \setminus \Gamma$. Since, by Theorem 4.1, continuation maps furnish an isomorphism
$\bigcup _{j=1}^\infty U_j=\Sigma \setminus \Gamma$. Since, by Theorem 4.1, continuation maps furnish an isomorphism
 \[ \underset{j}{\lim_{\longrightarrow}} SH_\ast^{U_j}(W)\to SH_\ast^{\Sigma\setminus\Gamma}(W), \]
\[ \underset{j}{\lim_{\longrightarrow}} SH_\ast^{U_j}(W)\to SH_\ast^{\Sigma\setminus\Gamma}(W), \]
there exist  $m\in \mathbb {N}$ and
$m\in \mathbb {N}$ and  $b_1,\ldots, b_k \in SH^{U_m}_\ast (W)$ such that
$b_1,\ldots, b_k \in SH^{U_m}_\ast (W)$ such that  $b_1, \ldots, b_k$ are mapped to
$b_1, \ldots, b_k$ are mapped to  $a_1, \ldots, a_k$ via the continuation map
$a_1, \ldots, a_k$ via the continuation map  $SH_\ast ^{U_m}(W)\to SH_\ast ^{\Sigma \setminus \Gamma }(W)$. The images of
$SH_\ast ^{U_m}(W)\to SH_\ast ^{\Sigma \setminus \Gamma }(W)$. The images of  $b_1, \ldots, b_k$ under the continuation map
$b_1, \ldots, b_k$ under the continuation map  $SH_\ast ^{U_m}(W)\to SH_\ast (W)$ are equal to
$SH_\ast ^{U_m}(W)\to SH_\ast (W)$ are equal to  $\Phi (a_1), \ldots, \Phi (a_k)$ and, therefore, are linearly independent. Hence,
$\Phi (a_1), \ldots, \Phi (a_k)$ and, therefore, are linearly independent. Hence,  $r(U_m)\geqslant k \geqslant c.$ This contradicts the assumption and finishes step 2.
$r(U_m)\geqslant k \geqslant c.$ This contradicts the assumption and finishes step 2.
Step 3: the final details. This step finishes the proof. Let  $\Omega, U\subset \Sigma$ be open non-empty subsets such that
$\Omega, U\subset \Sigma$ be open non-empty subsets such that  $U$ is non-dense, and such that
$U$ is non-dense, and such that  $r(\Omega )< r(U)$. Steps 1 and 2 prove the existence of such sets
$r(\Omega )< r(U)$. Steps 1 and 2 prove the existence of such sets  $\Omega$ and
$\Omega$ and  $U$. Let
$U$. Let  $a\in \Omega$ and
$a\in \Omega$ and  $b\in \Sigma \setminus \{a\}\setminus \overline {U}$ be two points. Since
$b\in \Sigma \setminus \{a\}\setminus \overline {U}$ be two points. Since  $\Sigma$ is a homotopy sphere, there exists a Morse function
$\Sigma$ is a homotopy sphere, there exists a Morse function  $f:\Sigma \to \operatorname {\mathbb {R}}$ that attains its minimum at
$f:\Sigma \to \operatorname {\mathbb {R}}$ that attains its minimum at  $a$ and its maximum at
$a$ and its maximum at  $b$ and that has no other critical points. The existence of such a function
$b$ and that has no other critical points. The existence of such a function  $f$ is guaranteed by the results of Smale [Reference SmaleSma56, Reference SmaleSma62b, Reference SmaleSma62a] and Cerf [Reference CerfCer68] (see also [Reference SaekiSae06, Proposition 2.2]). The Morse theory implies that
$f$ is guaranteed by the results of Smale [Reference SmaleSma56, Reference SmaleSma62b, Reference SmaleSma62a] and Cerf [Reference CerfCer68] (see also [Reference SaekiSae06, Proposition 2.2]). The Morse theory implies that  $\Sigma _t:= f^{-1} ((-\infty, t])$ is the standard
$\Sigma _t:= f^{-1} ((-\infty, t])$ is the standard  $(2n-1)$-dimensional closed ball smoothly embedded into
$(2n-1)$-dimensional closed ball smoothly embedded into  $\Sigma$ for all
$\Sigma$ for all  $t\in (f(a), f(b))$ (see, for instance, [Reference Banyaga and HurtubiseBH04]). For
$t\in (f(a), f(b))$ (see, for instance, [Reference Banyaga and HurtubiseBH04]). For  $s\in (f(a), f(b))$ sufficiently close to
$s\in (f(a), f(b))$ sufficiently close to  $f(a)$,
$f(a)$,  $\Sigma _s\subset \Omega$. Similarly, for
$\Sigma _s\subset \Omega$. Similarly, for  $\ell \in (f(a), f(b))$ sufficiently close to
$\ell \in (f(a), f(b))$ sufficiently close to  $f(b)$,
$f(b)$,  $\operatorname {int} \Sigma _\ell \supset U$. Since
$\operatorname {int} \Sigma _\ell \supset U$. Since  $r(\Omega )< r(U)$, by Theorem 1.8,
$r(\Omega )< r(U)$, by Theorem 1.8,  $U$ cannot be contactly squeezed into
$U$ cannot be contactly squeezed into  $\Omega$. Hence,
$\Omega$. Hence,  $\Sigma _\ell$ cannot be contactly squeezed into
$\Sigma _\ell$ cannot be contactly squeezed into  $\Sigma _s$ and the proof is finished (one can take
$\Sigma _s$ and the proof is finished (one can take  $B_2:=\Sigma _s$ and
$B_2:=\Sigma _s$ and  $B_1:=\Sigma _\ell$).
$B_1:=\Sigma _\ell$).
Now, we prove the contact non-squeezing for the Ustilovsky spheres.
Theorem 1.2 Let  $\Sigma$ be an Ustilovsky sphere. Then, there exist two embedded closed balls
$\Sigma$ be an Ustilovsky sphere. Then, there exist two embedded closed balls  $B_1, B_2\subset \Sigma$ of dimension equal to
$B_1, B_2\subset \Sigma$ of dimension equal to  $\dim \Sigma$ such that
$\dim \Sigma$ such that  $B_1$ cannot be contactly squeezed into
$B_1$ cannot be contactly squeezed into  $B_2$.
$B_2$.
Proof. In the view of Theorem 1.4, it is enough to show that the symplectic homology of the Brieskorn variety
 \[ W:=\{ z=(z_0,\ldots, z_{2m+1})\in\mathbb{C}^{2m+2}\,|\, z_0^p + z_1^2 + \cdots + z_{2m+1}^2=\varepsilon\text{ and } \lvert z \rvert\leqslant1\} \]
\[ W:=\{ z=(z_0,\ldots, z_{2m+1})\in\mathbb{C}^{2m+2}\,|\, z_0^p + z_1^2 + \cdots + z_{2m+1}^2=\varepsilon\text{ and } \lvert z \rvert\leqslant1\} \]
is infinite-dimensional. Here,  $m,p\in \mathbb {N}$ are natural numbers with
$m,p\in \mathbb {N}$ are natural numbers with  $p\equiv \pm 1\pmod {8}$ and
$p\equiv \pm 1\pmod {8}$ and  $\varepsilon \in \operatorname {\mathbb {R}}^+$ is sufficiently small. The Brieskorn variety
$\varepsilon \in \operatorname {\mathbb {R}}^+$ is sufficiently small. The Brieskorn variety  $W$ is a Liouville domain whose boundary is contactomorphic to an Ustilovsky sphere, and every Ustilovsky sphere is contactomorphic to
$W$ is a Liouville domain whose boundary is contactomorphic to an Ustilovsky sphere, and every Ustilovsky sphere is contactomorphic to  $\partial W$ for some choice of
$\partial W$ for some choice of  $m$ and
$m$ and  $p$.
$p$.
Let  $\Sigma _k$ be the sequence of manifolds such that
$\Sigma _k$ be the sequence of manifolds such that  $\Sigma _k=\partial W$ if
$\Sigma _k=\partial W$ if  $p\mid k$ (we use this notation for ‘
$p\mid k$ (we use this notation for ‘ $k$ is divisible by
$k$ is divisible by  $p$’) and such that
$p$’) and such that
 \[ \Sigma_k:=\{z=(z_1,\ldots, z_{2m+1})\in\mathbb{C}^{2m+1}\,|\, z_1^2+\cdots z_{2m+1}^2=0\text{ and } \lvert z \rvert=1\} \]
\[ \Sigma_k:=\{z=(z_1,\ldots, z_{2m+1})\in\mathbb{C}^{2m+1}\,|\, z_1^2+\cdots z_{2m+1}^2=0\text{ and } \lvert z \rvert=1\} \]
if  $p\nmid k$. Denote
$p\nmid k$. Denote
 \begin{align*} s_k:= \frac{k}{p}\cdot ((4m - 2)\cdot p + 4) - 2m \end{align*}
\begin{align*} s_k:= \frac{k}{p}\cdot ((4m - 2)\cdot p + 4) - 2m \end{align*}
if  $p\mid k$, and
$p\mid k$, and
 \begin{align*} s_k:= (4m-2)\cdot k + 2\cdot \bigg\lfloor\frac{2k}{p}\bigg\rfloor -2m +2 \end{align*}
\begin{align*} s_k:= (4m-2)\cdot k + 2\cdot \bigg\lfloor\frac{2k}{p}\bigg\rfloor -2m +2 \end{align*}
otherwise. Theorem B.11 from [Reference Kwon and van KoertKvK16] implies that there exists a spectral sequence  $E_{k,\ell }^r$ that converges to
$E_{k,\ell }^r$ that converges to  $SH_\ast (W)$ such that its first page is given by
$SH_\ast (W)$ such that its first page is given by
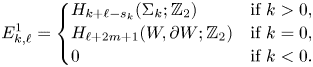 \[
E^1_{k,\ell}=\left\{\begin{array}{@{}l@{}l@{}l} & H_{k+\ell-s_k}(\Sigma_k;\mathbb{Z}_2) & \quad \text{if } k>0,\\ & H_{\ell+ 2m+1}(W, \partial W; \mathbb{Z}_2) & \quad \text{if }
k=0,\\ & 0 & \quad \text{if } k<0. \end{array}\right.
\]
\[
E^1_{k,\ell}=\left\{\begin{array}{@{}l@{}l@{}l} & H_{k+\ell-s_k}(\Sigma_k;\mathbb{Z}_2) & \quad \text{if } k>0,\\ & H_{\ell+ 2m+1}(W, \partial W; \mathbb{Z}_2) & \quad \text{if }
k=0,\\ & 0 & \quad \text{if } k<0. \end{array}\right.
\]
The terms of  $E^1$ can be explicitly computed. If
$E^1$ can be explicitly computed. If  $p\nmid k$, then
$p\nmid k$, then  $\Sigma _k$ is diffeomorphic to the unit cotangent bundle
$\Sigma _k$ is diffeomorphic to the unit cotangent bundle  $S^\ast \mathbb {S}^{2m}$ of the sphere. Otherwise,
$S^\ast \mathbb {S}^{2m}$ of the sphere. Otherwise,  $\Sigma _k$ is diffeomorphic to
$\Sigma _k$ is diffeomorphic to  $\mathbb {S}^{4m+1}$, because
$\mathbb {S}^{4m+1}$, because  $p\equiv \pm 1\pmod {8}$ (see [Reference BrieskornBri66]). Therefore,
$p\equiv \pm 1\pmod {8}$ (see [Reference BrieskornBri66]). Therefore,
 \[ H_j(\Sigma_k; \mathbb{Z}_2)\cong
\left\{\begin{array}{@{}l@{}l@{}l} & \mathbb{Z}_2 & \quad \text{if } j\in\{0,
2m-1, 2m, 4m-1\},\\ & 0 & \quad \text{otherwise,}
\end{array}\right. \]
\[ H_j(\Sigma_k; \mathbb{Z}_2)\cong
\left\{\begin{array}{@{}l@{}l@{}l} & \mathbb{Z}_2 & \quad \text{if } j\in\{0,
2m-1, 2m, 4m-1\},\\ & 0 & \quad \text{otherwise,}
\end{array}\right. \]
if  $p\nmid k$, and
$p\nmid k$, and
 \[ H_j(\Sigma_k; \mathbb{Z}_2)\cong
\left\{\begin{array}{@{}l@{}l@{}l} & \mathbb{Z}_2 & \quad \text{if }
j\in\{0,4m+1\}, \\ & 0 & \quad \text{otherwise,}
\end{array}\right. \]
\[ H_j(\Sigma_k; \mathbb{Z}_2)\cong
\left\{\begin{array}{@{}l@{}l@{}l} & \mathbb{Z}_2 & \quad \text{if }
j\in\{0,4m+1\}, \\ & 0 & \quad \text{otherwise,}
\end{array}\right. \]
if  $p\mid k$. The Brieskorn variety
$p\mid k$. The Brieskorn variety  $W$ is homotopy equivalent to the bouquet of
$W$ is homotopy equivalent to the bouquet of  $p-1$ spheres of dimension
$p-1$ spheres of dimension  $2m+1$ (see [Reference MilnorMil68, Theorem 6.5]). Therefore,
$2m+1$ (see [Reference MilnorMil68, Theorem 6.5]). Therefore,
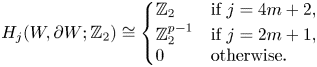 \[ H_j(W, \partial W; \mathbb{Z}_2)
\cong \left\{\begin{array}{@{}l@{}l@{}l} & \mathbb{Z}_2 & \quad \text{if }
j=4m+2,\\ & \mathbb{Z}_2^{p-1} & \quad \text{if } j=2m+1,\\ & 0 & \quad
\text{otherwise.} \end{array}\right. \]
\[ H_j(W, \partial W; \mathbb{Z}_2)
\cong \left\{\begin{array}{@{}l@{}l@{}l} & \mathbb{Z}_2 & \quad \text{if }
j=4m+2,\\ & \mathbb{Z}_2^{p-1} & \quad \text{if } j=2m+1,\\ & 0 & \quad
\text{otherwise.} \end{array}\right. \]
Figure 1 shows the page  $E^1_{k,\ell }$ for
$E^1_{k,\ell }$ for  $p=7$ and
$p=7$ and  $m=1$. For
$m=1$. For  $k\in \mathbb {N}\cup \{0\}$, denote by
$k\in \mathbb {N}\cup \{0\}$, denote by  $Q(k)$ the unique number in
$Q(k)$ the unique number in  $\mathbb {Z}$ such that
$\mathbb {Z}$ such that  $E^{1}_{k, Q(k)}\not =0$ and such that
$E^{1}_{k, Q(k)}\not =0$ and such that  $E^1_{k,\ell }=0$ for all
$E^1_{k,\ell }=0$ for all  $\ell >Q(k)$. Similarly, for
$\ell >Q(k)$. Similarly, for  $k\in \mathbb {N}\cup \{0\}$, denote by
$k\in \mathbb {N}\cup \{0\}$, denote by  $q(k)$ the unique number in
$q(k)$ the unique number in  $\mathbb {Z}$ such that
$\mathbb {Z}$ such that  $E^{1}_{k, q(k)}\not =0$ and such that
$E^{1}_{k, q(k)}\not =0$ and such that  $E^1_{k,\ell }=0$ for all
$E^1_{k,\ell }=0$ for all  $\ell < q(k)$. Explicitly,
$\ell < q(k)$. Explicitly,
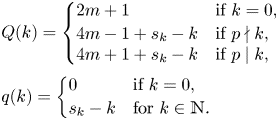 \begin{align*} &
Q(k)=\left\{\begin{array}{@{}l@{}l@{}l} & 2m+1 & \quad \text{if } k=0,\\ & 4m-1+s_k-k & \quad \text{if } p\nmid k,\\ & 4m+1+s_k-k & \quad \text{if
}p\mid k, \end{array}\right.\\ & q(k)=\left\{\begin{array}{@{}l@{}l@{}l} & 0 & \quad \text{if } k=0,\\ & s_k-k & \quad\text{for } k\in\mathbb{N}. \end{array}\right.
\end{align*}
\begin{align*} &
Q(k)=\left\{\begin{array}{@{}l@{}l@{}l} & 2m+1 & \quad \text{if } k=0,\\ & 4m-1+s_k-k & \quad \text{if } p\nmid k,\\ & 4m+1+s_k-k & \quad \text{if
}p\mid k, \end{array}\right.\\ & q(k)=\left\{\begin{array}{@{}l@{}l@{}l} & 0 & \quad \text{if } k=0,\\ & s_k-k & \quad\text{for } k\in\mathbb{N}. \end{array}\right.
\end{align*}
We will show that the element in  $E^1_{ap-1, Q(ap-1)}$ ‘survives’ in
$E^1_{ap-1, Q(ap-1)}$ ‘survives’ in  $SH_\ast (W)$ for
$SH_\ast (W)$ for  $a\in \mathbb {N}$. (In figure 1, the fields
$a\in \mathbb {N}$. (In figure 1, the fields  $(ap-1, Q(ap-1))$,
$(ap-1, Q(ap-1))$,  $a=1,2$ are emphasized by thicker edges.) Both sequences
$a=1,2$ are emphasized by thicker edges.) Both sequences  $Q(k)$ and
$Q(k)$ and  $q(k)$ are strictly increasing in
$q(k)$ are strictly increasing in  $k$. Since
$k$. Since  $Q(k)$ is strictly increasing, the element in
$Q(k)$ is strictly increasing, the element in  $E^1_{ap-1, Q(ap-1)}$ cannot be ‘killed’ by an element from
$E^1_{ap-1, Q(ap-1)}$ cannot be ‘killed’ by an element from  $E^1_{k,\ell }$ if
$E^1_{k,\ell }$ if  $k\leqslant ap-1$. Since
$k\leqslant ap-1$. Since
 \[ q(ap+1)-Q(ap-1)= 4m-3\geqslant 1, \]
\[ q(ap+1)-Q(ap-1)= 4m-3\geqslant 1, \]
the element in  $E^1_{ap-1, Q(ap-1)}$ cannot be ‘killed’ by an element from
$E^1_{ap-1, Q(ap-1)}$ cannot be ‘killed’ by an element from  $E^1_{k,\ell }$ if
$E^1_{k,\ell }$ if  $k\geqslant ap+1$. Finally, since
$k\geqslant ap+1$. Finally, since  $Q(ap-1)-q(ap)=2$, the non-zero groups
$Q(ap-1)-q(ap)=2$, the non-zero groups  $E_{ap, \ell }^1$ are those for
$E_{ap, \ell }^1$ are those for  $\ell = Q(ap-1)-2$ and
$\ell = Q(ap-1)-2$ and  $\ell =Q(ap-1)+4m-1$. In particular,
$\ell =Q(ap-1)+4m-1$. In particular,  $E^1_{ap, Q(ap-1)}=0$. Therefore,
$E^1_{ap, Q(ap-1)}=0$. Therefore,  $E^\infty _{ap-1, Q(ap-1)}\not =0$ for all
$E^\infty _{ap-1, Q(ap-1)}\not =0$ for all  $a\in \mathbb {N}$. This implies
$a\in \mathbb {N}$. This implies  $\dim SH_\ast (W)=\infty$ and the proof is finished.
$\dim SH_\ast (W)=\infty$ and the proof is finished.
Figure 1. The first page of the spectral sequence from the proof of Theorem 1.2 for  $p=7$ and
$p=7$ and  $m=1$. The number in the field
$m=1$. The number in the field  $(k,\ell )$ represents
$(k,\ell )$ represents  $\dim E^1_{k,\ell }$. Empty fields are assumed to contain zeros.
$\dim E^1_{k,\ell }$. Empty fields are assumed to contain zeros.
Finally, we prove Corollary 1.3.
Corollary 1.3 Let  $m\in \mathbb {N}$. Then, there exist a contact structure
$m\in \mathbb {N}$. Then, there exist a contact structure  $\xi$ on
$\xi$ on  $\operatorname {\mathbb {R}}^{4m+1}$ and an embedded closed ball
$\operatorname {\mathbb {R}}^{4m+1}$ and an embedded closed ball  $B\subset \operatorname {\mathbb {R}}^{4m+1}$ of dimension
$B\subset \operatorname {\mathbb {R}}^{4m+1}$ of dimension  $4m+1$ such that
$4m+1$ such that  $B$ cannot be contactly squeezed into an arbitrary non-empty open subset by a compactly supported contact isotopy of
$B$ cannot be contactly squeezed into an arbitrary non-empty open subset by a compactly supported contact isotopy of  $(\operatorname {\mathbb {R}}^{4m+1}, \xi )$.
$(\operatorname {\mathbb {R}}^{4m+1}, \xi )$.
Proof. Let  $S$ be a
$S$ be a  $(4m+1)$-dimensional Ustilovsky sphere and let
$(4m+1)$-dimensional Ustilovsky sphere and let  $B_1, B_2\subset S$ be two embedded closed balls such that
$B_1, B_2\subset S$ be two embedded closed balls such that  $B_1\cup B_2\not = S$ and such that
$B_1\cup B_2\not = S$ and such that  $B_2$ cannot be contactly squeezed into
$B_2$ cannot be contactly squeezed into  $B_1$. Let
$B_1$. Let  $p\in S\setminus (B_1\cup B_2)$. The Ustilovsky sphere
$p\in S\setminus (B_1\cup B_2)$. The Ustilovsky sphere  $S$ is diffeomorphic to the standard sphere. Hence, there exists a diffeomorphism
$S$ is diffeomorphic to the standard sphere. Hence, there exists a diffeomorphism  $\psi : \operatorname {\mathbb {R}}^{4m+1}\to S\setminus \{p\}$. Let
$\psi : \operatorname {\mathbb {R}}^{4m+1}\to S\setminus \{p\}$. Let  $\xi$ be the pull back of the contact structure on
$\xi$ be the pull back of the contact structure on  $S$ via
$S$ via  $\psi$. Now, we prove that
$\psi$. Now, we prove that  $\xi$ and
$\xi$ and  $B:=\psi ^{-1}(B_2)$ satisfy the conditions of the corollary. Assume the contrary. Then, there exists a compactly supported contact isotopy
$B:=\psi ^{-1}(B_2)$ satisfy the conditions of the corollary. Assume the contrary. Then, there exists a compactly supported contact isotopy  $\varphi _t: \operatorname {\mathbb {R}}^{4m+1}\to \operatorname {\mathbb {R}}^{4m+1}$ such that
$\varphi _t: \operatorname {\mathbb {R}}^{4m+1}\to \operatorname {\mathbb {R}}^{4m+1}$ such that  $\varphi _0=\operatorname {id}$ and such that
$\varphi _0=\operatorname {id}$ and such that  $\varphi _1(B)\subset \operatorname {int} (\psi ^{-1}(B_1))$. Since
$\varphi _1(B)\subset \operatorname {int} (\psi ^{-1}(B_1))$. Since  $\varphi$ is a compactly supported isotopy,
$\varphi$ is a compactly supported isotopy,  $\psi \circ \varphi _t\circ \psi ^{-1}$ extends to a contact isotopy on
$\psi \circ \varphi _t\circ \psi ^{-1}$ extends to a contact isotopy on  $S$. This contact isotopy squeezes
$S$. This contact isotopy squeezes  $B_2$ into
$B_2$ into  $B_1$. This is a contradiction that finishes the proof.
$B_1$. This is a contradiction that finishes the proof.
9. Isomorphisms furnished by paths of admissible contact Hamiltonians
In this section, we construct an isomorphism
 \[ \mathcal{B}(\{h^a\}): HF_\ast(h^0)\to HF_\ast(h^1) \]
\[ \mathcal{B}(\{h^a\}): HF_\ast(h^0)\to HF_\ast(h^1) \]
associated with a smooth family  $h^a_t:\partial W\to \operatorname {\mathbb {R}},\ a\in [0,1]$ of admissible contact Hamiltonians on the boundary of a Liouville domain
$h^a_t:\partial W\to \operatorname {\mathbb {R}},\ a\in [0,1]$ of admissible contact Hamiltonians on the boundary of a Liouville domain  $W$. As a particular instance of this construction, we associate an isomorphism
$W$. As a particular instance of this construction, we associate an isomorphism
 \[ \mathcal{B}(\varphi^f, \sigma) : HF_\ast(h)\to HF_\ast(h\#f) \]
\[ \mathcal{B}(\varphi^f, \sigma) : HF_\ast(h)\to HF_\ast(h\#f) \]
with a contractible loop  $\varphi ^f_t:\partial W\to \partial W$ of contactomorphisms and a homotopy
$\varphi ^f_t:\partial W\to \partial W$ of contactomorphisms and a homotopy  $\sigma$ from the constant loop
$\sigma$ from the constant loop  $t\mapsto \operatorname {id}$ to
$t\mapsto \operatorname {id}$ to  $\varphi ^f$.
$\varphi ^f$.
Denote by  $\mathfrak {S}$ the set of admissible contact Hamiltonians
$\mathfrak {S}$ the set of admissible contact Hamiltonians  $h_t:\partial W\to \operatorname {\mathbb {R}}$ on the boundary
$h_t:\partial W\to \operatorname {\mathbb {R}}$ on the boundary  $\partial W$ of a Liouville domain
$\partial W$ of a Liouville domain  $W$. The set
$W$. The set  $\mathfrak {S}$ is open in the space of the smooth functions
$\mathfrak {S}$ is open in the space of the smooth functions  $\partial W\times \mathbb {S}^1\to \operatorname {\mathbb {R}}$ with respect to the
$\partial W\times \mathbb {S}^1\to \operatorname {\mathbb {R}}$ with respect to the  $C^2$ topology. Let
$C^2$ topology. Let  $\lVert \cdot \rVert _{C^2}$ be a norm inducing the
$\lVert \cdot \rVert _{C^2}$ be a norm inducing the  $C^2$-topology. Denote by
$C^2$-topology. Denote by  $\mathcal {F}$ the family of open balls
$\mathcal {F}$ the family of open balls  $B_R(\eta )$ with respect to
$B_R(\eta )$ with respect to  $\lVert \cdot \rVert _{C^2}$ that satisfy
$\lVert \cdot \rVert _{C^2}$ that satisfy  $B_{9R}(\eta )\subset \mathfrak {S}$. For
$B_{9R}(\eta )\subset \mathfrak {S}$. For  $\mathcal {O}=B_R(\eta )\in \mathcal {F}$, denote
$\mathcal {O}=B_R(\eta )\in \mathcal {F}$, denote  $\tilde {\mathcal {O}}:=B_{3R}(\eta )$.
$\tilde {\mathcal {O}}:=B_{3R}(\eta )$.
Definition 9.1 Let  $h^a, a\in [0,1]$ be a smooth family of admissible contact Hamiltonians on the boundary of a Liouville domain. The isomorphism
$h^a, a\in [0,1]$ be a smooth family of admissible contact Hamiltonians on the boundary of a Liouville domain. The isomorphism
 \begin{align*} \mathcal{B}(\{h^a\}) : HF_\ast(h^0)\to HF_\ast(h^1) \end{align*}
\begin{align*} \mathcal{B}(\{h^a\}) : HF_\ast(h^0)\to HF_\ast(h^1) \end{align*}
is defined in the following way.
1. Choose finitely many sets
$\mathcal {O}_1, \ldots, \mathcal {O}_m\in \mathcal {F}$ such that $h^a\in \bigcup _{j=1}^m \mathcal {O}_j$ for all $a\in [0,1]$.2. Choose
$0=a_0< a_1<\cdots < a_k=1$ such that for each $j=0,\ldots, k-1$ there exists $\ell _j\in \{1,\ldots m\}$ such that $h^a\in \mathcal {O}_{\ell _j}$ for all $a\in [a_j, a_{j+1}]$.3. Choose
$g^0,\ldots g^{k-1}\in \mathfrak {S}$ such that $g_j\in \tilde {\mathcal {O}}_{\ell _j}$ and $g_j\leqslant h^{a_j}, h^{a_{j+1}}$ for $j=0,\ldots, k-1$.4. Denote by
the continuation maps (they are isomorphisms because the contact Hamiltonians\begin{align*} & \Phi^j : HF_\ast(g^j)\to HF_\ast(h^{a_j}) \\ & \Psi^j : HF_\ast(g^j)\to HF_\ast(h^{a_{j+1}}) \end{align*}
$(1-s)\cdot g^j + s\cdot h^{a_j}$ and $(1-s)\cdot g^j + s\cdot h^{a_{j+1}}$ are admissible and increasing with respect to the $s$-variable, see [Reference Uljarević and ZhangUZ22, Theorem 1.3]), $j=0,\ldots, k-1$.5. Define
\[ \mathcal{B}(h):= \Psi^{k-1}\circ (\Phi^{k-1})^{-1}\circ\cdots \circ \Psi^1\circ (\Phi^1)^{-1}\circ \Psi^0\circ (\Phi^0)^{-1}. \]


















The isomorphism  $\mathcal {B}(\{h^a\})$ does not depend on the additional choices. Moreover, if
$\mathcal {B}(\{h^a\})$ does not depend on the additional choices. Moreover, if  $\{h^a\}$ and
$\{h^a\}$ and  $\{f^a\}$,
$\{f^a\}$,  $a\in [0,1]$ are two smooth families of admissible contact Hamiltonians such that
$a\in [0,1]$ are two smooth families of admissible contact Hamiltonians such that  $h^a\leqslant f^a$ for all
$h^a\leqslant f^a$ for all  $a\in [0,1]$, then the following diagram commutes.
$a\in [0,1]$, then the following diagram commutes.
In the diagram, the vertical arrows represent the continuation maps. Now, we associate an isomorphism  $\mathcal {B}(\varphi ^f,\sigma ): HF_\ast (h)\to HF_\ast (h\#f)$ with a contractible (smooth) loop
$\mathcal {B}(\varphi ^f,\sigma ): HF_\ast (h)\to HF_\ast (h\#f)$ with a contractible (smooth) loop  $\varphi ^f_t:\partial W\to \partial W$ of contactomorphisms and a smooth homotopy
$\varphi ^f_t:\partial W\to \partial W$ of contactomorphisms and a smooth homotopy  $\sigma ^a_t:\partial W\to \partial W$ from the constant loop based at the identity to
$\sigma ^a_t:\partial W\to \partial W$ from the constant loop based at the identity to  $\varphi ^f$. We see the homotopy
$\varphi ^f$. We see the homotopy  $\sigma ^a_t$ as a smooth
$\sigma ^a_t$ as a smooth  $\operatorname {\mathbb {R}}\times [0,1]$-family of contactomorphisms that is 1-periodic in the
$\operatorname {\mathbb {R}}\times [0,1]$-family of contactomorphisms that is 1-periodic in the  $t\in \operatorname {\mathbb {R}}$ variable and such that the following hold:
$t\in \operatorname {\mathbb {R}}$ variable and such that the following hold:
1.
$\sigma _t^0=\operatorname {id}$ for all $t\in \operatorname {\mathbb {R}}$;2.
$\sigma _0^a=\sigma _1^a=\operatorname {id}$ for all $a\in [0,1]$;3.
$\sigma _t^1=\varphi _t^f$ for all $t\in \operatorname {\mathbb {R}}$.






For every admissible contact Hamiltonian  $h\in \mathfrak {S}$, the homotopy
$h\in \mathfrak {S}$, the homotopy  $\sigma$ furnishes a smooth family
$\sigma$ furnishes a smooth family  $\eta ^a:=h\#f^a$ of admissible contact Hamiltonians. Here,
$\eta ^a:=h\#f^a$ of admissible contact Hamiltonians. Here,  $f^a$ denotes the contact Hamiltonian of the contact isotopy
$f^a$ denotes the contact Hamiltonian of the contact isotopy  $t\mapsto \sigma ^a_t$. Define
$t\mapsto \sigma ^a_t$. Define  $\mathcal {B}(\varphi ^f,\sigma ):= \mathcal {B}(\{\eta ^a\})$. Now we show that
$\mathcal {B}(\varphi ^f,\sigma ):= \mathcal {B}(\{\eta ^a\})$. Now we show that  $\sigma$ also induces an isomorphism
$\sigma$ also induces an isomorphism  $SH_\ast (W)\to SH_\ast (W)$ that behaves well with respect to the canonical maps
$SH_\ast (W)\to SH_\ast (W)$ that behaves well with respect to the canonical maps  $HF_\ast (h)\to SH_\ast (W)$. For a contact Hamiltonian
$HF_\ast (h)\to SH_\ast (W)$. For a contact Hamiltonian  $h$, denote
$h$, denote  $\operatorname {osc}(h):=\max _{x,t} h_t(x)- \min _{x,t} h_t(x)$ and denote by
$\operatorname {osc}(h):=\max _{x,t} h_t(x)- \min _{x,t} h_t(x)$ and denote by  $\kappa _t^h$ the smooth function determined by
$\kappa _t^h$ the smooth function determined by  $(\varphi _t^h)^\ast \alpha =\kappa _t^h\cdot \alpha$, where
$(\varphi _t^h)^\ast \alpha =\kappa _t^h\cdot \alpha$, where  $\alpha$ is the contact form. If
$\alpha$ is the contact form. If  $h,g$ are admissible contact Hamiltonians such that
$h,g$ are admissible contact Hamiltonians such that
 \[ g-h\geqslant \max_{a\in[0,1]} \operatorname{osc}(f^a\cdot \kappa^h), \]
\[ g-h\geqslant \max_{a\in[0,1]} \operatorname{osc}(f^a\cdot \kappa^h), \]
then  $g\# f^a\geqslant h\#f^a$ for all
$g\# f^a\geqslant h\#f^a$ for all  $a\in [0,1]$. Consequently, the following diagram commutes.
$a\in [0,1]$. Consequently, the following diagram commutes.
In the diagram, the vertical arrows represent the continuation maps. Hence, there exists an isomorphism  $\mathcal {B}(\varphi ^f,\sigma ): SH_\ast (W)\to SH_\ast (W)$ such that the following diagram, whose vertical arrows are canonical morphisms, commutes for every admissible contact Hamiltonian
$\mathcal {B}(\varphi ^f,\sigma ): SH_\ast (W)\to SH_\ast (W)$ such that the following diagram, whose vertical arrows are canonical morphisms, commutes for every admissible contact Hamiltonian  $h$.
$h$.
Acknowledgements
I would like to thank Paul Biran and Leonid Polterovich for their interest in this work and for valuable suggestions. This research was supported by the Science Fund of the Republic of Serbia, grant no. 7749891, Graphical Languages – GWORDS.
Conflicts of Interest
None.












 Open access
Open access